MPU6050和STM32L152的微功耗三維無線鼠標設計

摘要:利用運動傳感芯片MPU6050和STM32L152,設計了一款運動感知及處理模塊功耗僅為1.2 mA左右的低功耗三維鼠標。針對功耗問題,詳細介紹了符合鼠標低功耗工作要求的STM32L152低功耗運行、睡眠模式配置,以及MPU6050加速度計單獨循環、單軸加速度計工作模式的配置,給出了加速度計標定及基于加速度計的姿態角計算方法,實現了鼠標姿態的精確測量。
本文引用地址:http://www.104case.com/article/201609/303454.htm引言
針對低功耗設計問題,大多數三維無線鼠標僅考慮無線模塊的低功耗設計。本文在此基礎上,進一步將鼠標處理器模塊及慣性測量模塊功耗考慮進來,實現一款功耗更低、性能更優的三維無線鼠標。
1 方案選擇
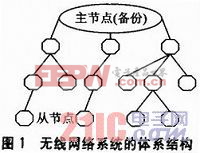
系統主要由電源模塊、運動感測追蹤組件MPU6050模塊、串口轉無線WiFi模塊和主控芯片STM32L152構成,系統功能框圖如圖1所示。這里WiFi模塊只是用于遠程傳輸測試,不在低功耗設計考慮之中,若考慮遠程傳輸低功耗設計,則使用ZigBee無線傳輸。

2 硬件電路設計
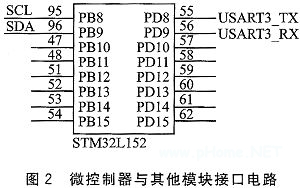
2. 1 微控制器接口電路
主控芯片STM32L152與MPU6050的I2C和串口轉WiFi模塊的接口電路如圖2所示。
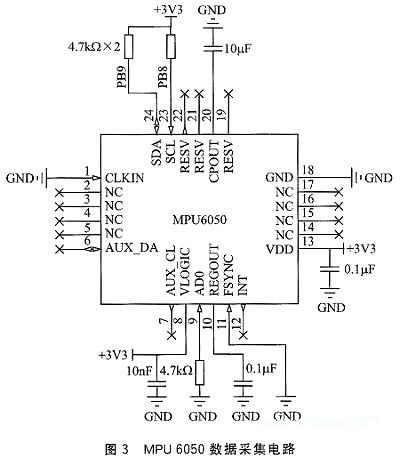
2.2 運動感測追蹤組件MPU6050電路
MPU6050硬件電路設計如圖3所示,將其SCL、SDA端口連接4.7 kΩ上拉電阻(否則I2C總線不能通信),并與微處理器PB8、PB9引腳相連;AD0經4.7 kΩ電阻接地,讀寫器件地址為0xD0,若懸空或接高電平,地址為0xD2;濾波電容取值0.1μF,電荷泵電容取值10 μF,否則片上傳感器不工作。
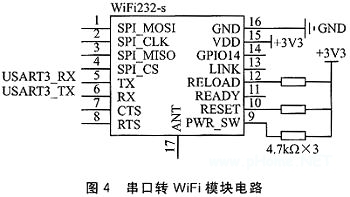
2.3 串口轉WiFi模塊電路
WiFi232-s是一款實現串口到WiFi數據包的雙向透明轉發,其內部完成協議轉換。串口轉WiFi模塊電路如圖4所示。通過串口或WiFi網絡連接至電腦,可以對模塊進行AT指令集設置其配置參數。其中9、10、12引腳接4.7 kΩ上拉電阻,5、6引腳接處理器串口引腳PD8、PD9。
3 軟件設計
3.1 三維鼠標低功耗設計描述
使用MPU6050可以設計兩種三維鼠標:基于加速度計或陀螺儀,這里主要討論基于加速度計的三維鼠標設計。
三維鼠標低功耗設計中,主要實現在鼠標不工作時系統進入睡眠模式,達到功耗最低,并且能夠及時從睡眠中喚醒,進入工作狀態。因此,在微處理器STM32L152中設置一個3s定時器,用來掃描鼠標當前狀態是否符合進入睡眠模式條件。每當定時溢出中斷到來后,采集加速度計Z軸輸出值并持續0.5s,采集的當前數據與上一時刻相減得到變化值,判斷其是否大于所設的閾值,并對這些大于閾值的數據進行計數。若計數大于所設閾值,則鼠標仍然保持工作狀態,等待下一次定時中斷到來,此時STM32L152為低功耗運行模式,MPU6050工作模式為加速度計單獨循環模式;若計數小于所設閾值,則鼠標進入睡眠模式,此時微處理器設置為低功耗睡眠模式,MPU6050的工作模式設置為加速度計Z軸工作,其余軸為Standby待機模式。
3.2 MPU6050低功耗設置
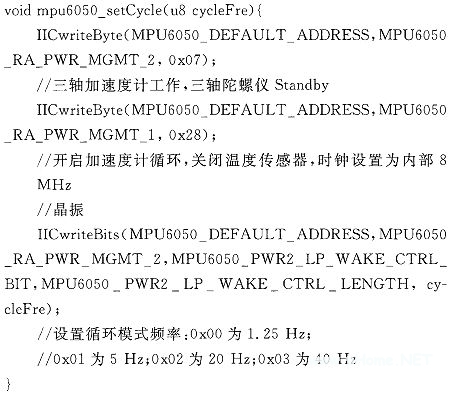
(1)MPU6050加速度計單獨循環工作模式
三維鼠標的MPU6050模塊中的三軸加速度計設置為循環工作模式,三軸陀螺儀設置為Standby待機模式,此時MPU6050電流消耗500μA。
MPU6050生產商已經給出了編程所需頭文件mpu6050.h,其將編程中所用到的寄存器都做了定義,如MPU6050 DEFAULT ADDRESS,在頭文件中對應地址為0xD0或0xD2。
(2)MPU6050其他工作模式配置
MPU6050睡眠模式:電源管理1寄存器PWR_MGMT_1設置為0x40。此時加速度和陀螺儀傳感器都進入Standby待機模式,陀螺儀輸出值為0,加速度傳感器輸出一個固定值,MPU 6050電流消耗為5μA。
MPU6050陀螺儀單獨運行模式:電源管理1寄存器PWR_MGMT_1設置為0x0C,電源管理2寄存器PWR_MGMT_2設置為0x38。此時只有陀螺儀傳感器工作,加速度計進入Standby待機模式,輸出為一個固定值,MPU6050電流消耗為3.6 mA。
3.3 STM32L152低功耗設置
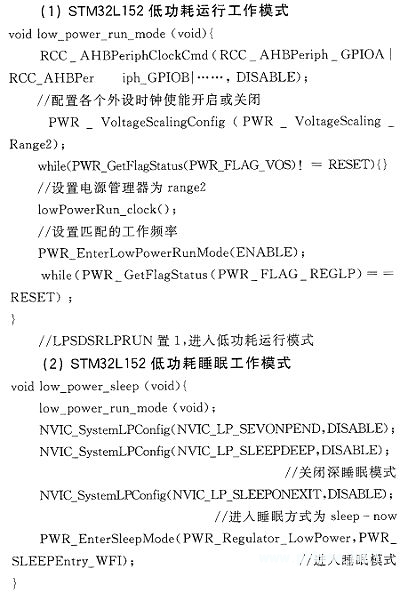
注意,一般睡眠函數放置在while循環最后執行,在其他任務跑完后進入睡眠模式,待中斷到來時喚醒。
(3)STM32L152低功耗模式參數
低功耗睡眠模式:當靜止不動時,三維鼠標會進入不工作狀態。此時只有微處理器中的3 s定時掃描MPU6050加速度計Z軸動作的定時器在工作,在1.8 V或3 V電壓下,微處理器功耗為6.1μA。
低功耗運行模式:三維鼠標進行旋轉或位移動作時,進入工作狀態,此時STM32L152處于低功耗運行模式,主頻設置為16 MHz。關閉所有無關的外設,其電流消耗在500 μA左右。
3.4 鼠標工作狀態及睡眠狀態下的總功耗
鼠標正常工作狀態:STM32L152工作在低功耗運行模式,MPU6050工作在加速度計單獨循環模式,電流消耗在1.2 mA左右。

相關推薦
-
basketj | 2014-03-03
-
-
i646593001 | 2014-06-21
-
-
-
-
-
-
dawnjeanh | 2014-07-15
-
科泉 | 2014-02-21
-
ml418ily | 2014-05-18
評論