深度剖析步進電機

步進電機因其在速度和位置控制精度上的優(yōu)秀性能,在電機行業(yè)中應用廣泛。對于步進電機的架構和驅動方式、工作原理、應用中的注意事項,我們將進行深度剖析。
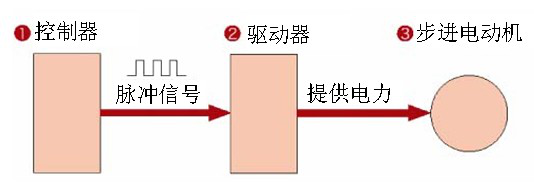
本文引用地址:http://www.104case.com/article/201606/292263.htm步進電機是一種作為控制用的特種電機, 它的旋轉是以固定的角度(稱為"步距角")一步一步運行的, 其特點是沒有積累誤差(精度為100%), 所以廣泛應用于各種開環(huán)控制。步進電機的運行要有一電子裝置進行驅動, 這種裝置就是步進 電機驅動器, 它是把控制系統(tǒng)發(fā)出的 脈沖信號轉化為步進電機的角位移, 或者說: 控制系統(tǒng)每發(fā)一個脈沖信號, 通過驅動器就使步進電機旋轉一步距角,所以步進電機的轉速與脈沖信號的頻率成正比。因此控制步進脈沖信號的頻率,可以對電機精確調(diào)速;控制步進脈沖的個數(shù),可以對電機精確定位目的。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
一、步進電機的構造(以五相步進電機為例)
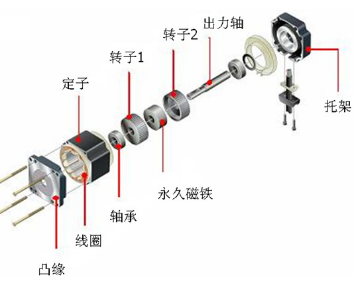
步進電機的構造如下圖所示,大致分為定子和轉子兩部分。轉子由轉子1、轉子2和永久磁鋼組成。
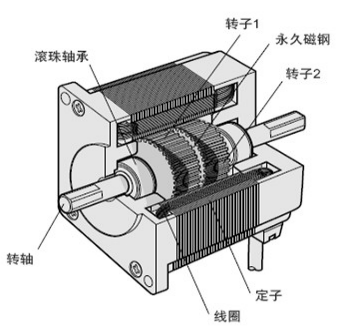
定子擁有小齒狀的磁極,共有 10個,皆繞有線圈。 其線圈的對角位置的磁極相互連接著,電流流通后,線圈即會被磁 化成同一極性。(例如某一線圈經(jīng)由電流的流通后,對角線的磁極將 同化成 S 極或 N 極。) 對角線的 2個磁極形成 1個相,而由于有 A相至 E相等 5個 相位,因此稱為 5 相步進 電動機。
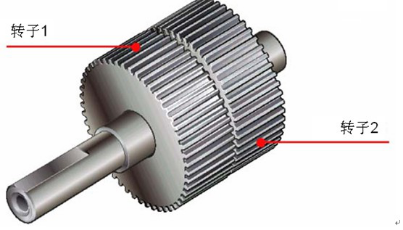
轉子的外圈由 50個小齒構成,轉子 1 和轉子 2 的小齒于構造上互 相錯開 1/2 螺距。由此轉子形成了100個小齒。目前已經(jīng)有轉子單個加工至100齒的高分辨率型,那么高分辨率型的轉子就有200個小齒。因此其機械上就可以實現(xiàn)普通步進電機半步(普通步進電機半步需要電氣細分達到)的分辨率。

二、 步進電機工作原理
當電流流過定子繞組時,定子繞組產(chǎn)生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數(shù)成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數(shù)量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
三、步進電機的控制
步進電機驅動方式有三種基本的驅動模式:整步、半步、細分。其主要區(qū)別在于電機線圈電流的控制精度(即激磁方式)。通常步進電機都有低頻振動的特點,通過細分調(diào)協(xié)可以改善電機低速動運行的平衡性。下面給大家詳細介紹一下:
1、整步驅動
在整步運行中,同一種步進電機既可配整/半步驅動器也可配細分驅動器,但運行效果不同。步進電機驅動器按脈沖/方向指令對兩相步進電機的兩個線圈循環(huán)激磁(即將線圈充電設定電流),這種驅動方式的每個脈沖將使電機移動一個基本步距角,即1.80度 (標準兩相電機的一圈共有200個步距角)。
2、半步驅動
在單相激磁時,電機轉軸停至整步位置上,驅動器收到下一脈沖后,如給另一相激磁且保持原來相繼處在激磁狀態(tài),則電機轉軸將移動半個步距角,停在相鄰兩個整步位置的中間。如此循環(huán)地對兩相線圈進行單相然后雙相激磁步進電機將以每個脈沖0.90度的半步方式轉動。和整步方式相比,半步方式具有精度高一倍和低速運行時振動較小的優(yōu)點,所以實際使用整/半步驅動器時一般選用半步模式。
3、細分驅動
細分驅動模式具有低速振動極小和定位精度高兩大優(yōu)點。對于有時需要低速運行(即電機轉軸有時工作在60rpm以下)或定位精度要求小于0.90度的步進應用中,細分驅動器獲得廣泛應用。
其基本原理是對電機的兩個線圈分別按正弦和 余弦形的臺階進行精密電流控制,從而使得一個步距角的距離分成若干個細分步完成。例如十六細分的驅動方式可使每圈200標準步的步進電機達到每圈200*16=3200步的運行精度(即0.1125°)。
四、應用中的注意點
1、步進電機應用于低速場合---每分鐘轉速不超過1000轉,(0.9度時6666PPS),最好在1000-3000PPS(0.9度)間使用,可通過減速裝置使其在此間工作,此時電機工作效率高,噪音低。
2、步進電機最好不使用整步狀態(tài),整步狀態(tài)時振動大。
3、轉動慣量大的負載應選擇大機座號電機。
4、電機在較高速或大慣量負載時,一般不在工作速度起動,而采用逐漸升頻提速,一電機不失步,二可以減少噪音同時可以提高停止的定位精度。
5、高精度時,應通過機械減速、提高電機速度,或采用高細分數(shù)的驅動器來解決,也可以采用5相電機,不過其整個系統(tǒng)的價格較貴,生產(chǎn)廠家少。
五、步進電機測試注意點
根據(jù)國標GB/T 20638-2006,對于步進電機的測試我們一般需要關注反電動勢常數(shù)、保持轉矩、繞組溫升、矩角特性測試、牽出轉矩、最高反轉頻率等測試。
對于反電動勢常數(shù)的測試,可以采用功率分析儀的測試方法直接在儀器上得出反電動勢常數(shù)。對于牽出轉矩的測試,對于大基座的步進電機,一般采用磁粉制動器和電機測試平臺來進行測試,小基座的步進電機采用彈簧秤和繩子的組合方法來測試。MPT電機測試系統(tǒng)目前針對步進電機的測試可以提供整體的測試方案和測試系統(tǒng),幫助工程師快速完善研發(fā)設計的步進電機。









評論