一種汽車電動式轉向器的電控系統設計

4 信號采集硬件電路設計
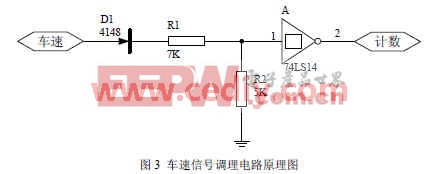
4.1 車速信號調理電路
多軸轉向控制系統需要實時檢測車速值,車速值的檢測是由霍爾車速傳感器將變速器輸出軸的轉速變換成不同頻率的序列脈沖,單片機對脈沖序列進行計數,轉換成當前的車速值。一般傳感器產生的脈沖信號比較微弱,要通過放大電路處理成TTL 或CMOS信號輸入單片機,但是車用傳感器內部大都有信號處理電路,輸出電壓為車用電壓范圍,須調整后才能輸入到單片機中。此外,從傳感器得到的矩形脈沖經傳輸后往往發生波形畸變。利用施密特觸發器狀態轉換過程中的正反饋作用,可以把邊沿變化緩慢的周期性信號變換為邊沿很陡的矩形脈沖信號。根據以上原理設計的車速信號調理電路如圖3。
 本文引用地址:http://www.104case.com/article/197890.htm
本文引用地址:http://www.104case.com/article/197890.htm4.2 前輪轉角信號調理電路
根據旋轉編碼器的工作原理,當方向盤轉角發生變化時光電編碼器便會發出A、B 兩路相位差90°的數字脈沖信號。正轉時A 超前B 為90°,反轉時B 超前A 為90°。脈沖的個數與角度值成比例的關系,所以通過對脈沖的計數就可以得到方向盤轉角的大小。考慮到汽車方向盤轉動是雙向的,既可順時針旋轉,也可逆時針旋轉,需要對編碼器的輸出信號進行鑒相后才能計數。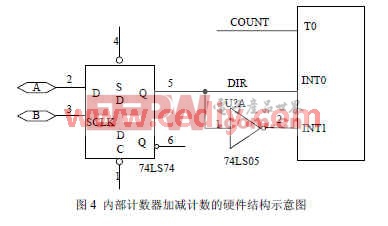
我們可以把經過D 觸發器之后的脈沖即方向控制脈沖(DIR)接到單片機的外部中斷INT0 端,經過反向器后再接到另一個外部中斷INT1,并把計數脈沖A 接到單片機的片內計數器T0 端即可。相對外部計數芯片來說,使用這種方法時電路相對要簡單得多。系統工作時,先要把兩個中斷設置成低電平觸發,并打開相應的中斷。當DIR 高電平時,表示方向盤順時針旋轉,INT1 中斷,執行相應的中斷程序,進行加計數;而當DIR 低電平時,表示方向盤逆時針旋轉,INT0 中斷,執行相應的中斷程序,進行減計數(實際是重賦值,進行加計數)。圖4 為內部計數器加減計數的硬件結構示意圖。
4. 3 液壓缸位移信號調理電路
電控系統中需要時刻檢測后輪轉角的當前值,與目標轉角值比較,得出偏差e( t),生成PWM 信號,直到偏差e (t)在允許范圍內。后輪轉角的測量是通過測量液壓缸的位移值間接得到。位移信號屬于模擬信號,P89C52 單片機中沒有A/D 轉換模塊,需外接A/D 轉換電路。采用8 位的AD678 來完成。AD678 的優點在于它的模擬信號輸入的極性非常容易控制,且引腳連接簡便。
4.4 驅動執行硬件電路設計
4.4.1 比例電磁閥驅動電路
通常單片機輸出的開關電壓信號最大值為 5V,且根據MCS-51 系列芯片輸出的電氣性能可知,其輸出電流不宜超過15mA,不足以驅動比例閥的電磁鐵。故必須要有一個驅動功率放大器,把開關電壓信號加以放大,使在電磁線圈中產生足夠的激磁電流。對于比例方向閥,為了加快電磁線圈的電流響應速度,必須采用快速驅動電路,即電流的增長和消退都非常迅速的電路。本文采用如圖7 所示的VMOS 功率場效應管為主構成功率放大器電路原理圖。該電路驅動功率大,響應時間在毫秒級,單片機與功率級之間隔離良好。在電路圖5 中,輸入部分和輸出部分采用兩套相互獨力的電源,且不共地,沒有電氣聯系,從而實現了電氣隔離。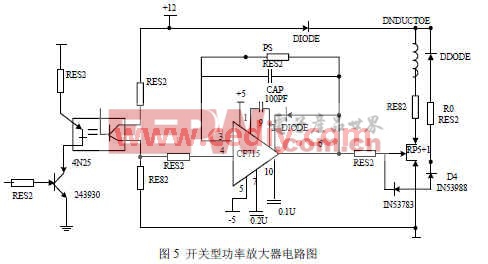
4.5 其它外圍電路設計
4.5.1 電源電路
電源模塊是將車載電源通過 DC/DC 變換轉換成控制系統所需要的電壓,車載電源為12V或24V,單片機系統工作電壓為5V。DC/DC 轉換器種類繁多,本系統采用78L00 系列的78L05進行降壓。78L00 系列DC/DC 轉換器電路簡單實用,只需要另加兩個電容就可以構成轉換電路。78L05 的輸入范圍為7V-24V,輸出電壓為5V。
4.5.2 復位電路
在一般的計算機系統中,為防止系統在加電、電源突然掉電以及電網瞬時欠壓而引起誤動作,需要有可靠的復位電路和電源監視電路。
本文作者創新點
本文針對多軸轉向系統實時多任務特性,提出了基于CAN 總線的多軸轉向技術,以確保車輛在轉向狀態下的安全穩定性及后橋轉向的快速跟隨特性;論文設計了包括主控模塊和控制執行模塊在內的多軸轉向電控單元。





評論