智能汽車防撞報警器的設計開發

摘 要:設計并開發了應用于汽車的防撞系統。基于超聲波原理,防撞系統通過發射和接收超聲波信號,測算出時間差,再利用控制系統換算成距離,判斷處理。該系統采用發生器電路、換能器、線性功率放大器。另外,系統采取了三個防干擾措施。由于防干擾措施的實施,使系統能在工業現場中有較小的穩態誤差,有效防止了碰撞事故的發生。
關鍵詞:單片機;超聲波測距;汽車防撞雷達;軟件系統
0 引 言
汽車防撞報警器的核心部件是汽車防撞雷達。汽車防撞雷達(俗稱電子眼)之所以能實現防撞報警功能,主要有超聲波這把無形尺子,它測量最近障礙物的距離,并告知車主。超聲測距原理簡單:它發射超聲波并接收反射回波,通過單片機計數器獲得兩者時間差t,利用公式S=Ct/2計算距離(S為汽車與障礙物之間的距離;C為聲波在介質中的傳播速度,C=331.4(1+θ/273);θ為攝氏溫度。本文介紹的超聲測距系統共有4只超聲波換能器(俗稱探頭),分別布置在汽車的前左、前右、后左、后右4個位置上。能檢測前進和倒車方向障礙物的距離,通過后視鏡內置的顯示單元顯示距離和方位,發出一定的聲響,起報警防撞作用。
1 天車防撞報警儀的總體方案設計
1.1 防撞報警儀的主要設計指標
(1)報警距離:5~30 m,根據用戶的具體需要連續可調;
(2)根據用戶的需要選用分檔:0.6 m,1.0 m,1.5 m,1.8m,2.4 m;
(3)電源:車載電瓶12 V;
(4)環境溫度:-20~+70℃;
(5)報警器尺寸:155 mm×155 mm×63 mm,重量:3.5 kg。
1.2 系統總體方案
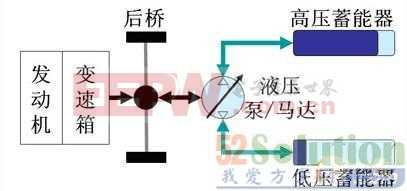
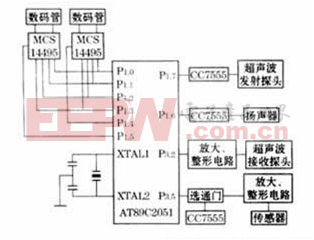
汽車防撞報警儀采用由AT89C52單片機為核心組成的微機系統,對儀器進行控制,其硬件系統如圖1所示。

1.3 工作原理
本防撞裝置利用聲波作為檢測波,利用超聲波作為機械波,其頻率為20 kHz~20 MHz。隨著頻率的增加,檢測距離減小,使用頻率在15~40 kHz之間,檢測距離為0.5~3.0 m,由發射器、接收器、控制器和反射板組成。發射器、接收器和控制器安裝在防撞主體(指由產品控制能實現防撞功能的汽車面板)上。發射器發出檢測波,經反射面反射給接收器,通過判斷處理后,發送控制器執行規定的功能。基于單片機的天車防撞系統采用AT89C52單片機和專用芯片測量超聲波發射到反射回所需的時間t,由S=vt(v=314 m/s,計算時加入溫度補償)得到從聲波發射到反射面的距離。此距離隨時顯示在汽車駕駛室內,軟件可以設置幾級提示和報警,當車障之間距離小于安全距離時,設置在駕駛室的聲光報警儀即發出聲光信號,通知駕駛員謹慎操作,從而有效地防止碰撞事故發生,保證人身及設備的安全。
2 硬件設計
2.1 固有頻率正反饋發生器電路
在硬件電路結構上,很重要的一點是保證超聲波發射頻率與換能器固有頻率的一致和穩定,不隨時間或因溫度而漂移,同時也有利于超聲波換能器發射能量的轉換。為達到這個目的,固有頻率正反饋發生器電路是措施之一。
2.2 換能器
只使用一個換能器也有利于達到這個目的,因為反射回的聲波就是它本身發射的聲波,共振頻率相同,壓電效應最佳。從電路結構講,發射與接收切換器,使得一個換能器起到發射與接收的兩個作用。
2.3 線性電路
線性電路包括前置放大、噪音過濾、線性放大、整形電路。將微弱的聲發射和接收信號進行處理,使之能與單片機部分的后續電路相匹配。
2.4 微機處理器(主AT89C52)
通過軟件編程,使之能控制系統的正常工作。具體功能如下:聲發射控制、報警距離級別選擇、聲光語音報警、車位距離顯示、汽車和串口中斷傳送數據。
2.5 顯示部分
顯示部分由從AT89C52和LED數碼管組成,能將主AT89C52傳過來的信號經過驅動傳送給位于駕駛室的從AT89C52的串口,再點亮LED數碼管,起提示作用。
以上電路(除位于駕駛室的顯示部分外)采用集成電路芯片,使之結構緊湊,工作可靠。對超聲波進行編碼和解碼,能完全克服各類頻譜的汽車光源和自然光源的干擾。因帶有單片機電路結構的系統必須保證抗干擾,故在本儀器中,電源電路和相應的抗干擾電路是不可少的,軟件程序編寫也要與硬件配合,同時解決抗電磁干擾問題。既然是利用聲波測量距離,就要考慮使用現場的聲波環境,因為它們同樣能被超聲波換能器接收到。用于測量距離的超聲波換能器的固有頻率一般都在15~40 kHz,而路面的噪音頻率是十分豐富的,它們中的聲譜頻率有與使用的換能器的固有頻率相同的部分,則干擾回波測量。因此,在硬件電路上要解決這個問題,同時在軟件程序的編制上也要有抗干擾部分。報警距離級別選擇是為了用戶在不修改程序的情況下,根據用戶自己的意愿來選擇。



評論