改進的地圖匹配技術在車載導航系統中的應用

令△Cdistance為GPS值與當前道路投影點之間的距離;△distance為GPS值與其他道路投影點之間的距離;MaxD為預先設定的搜索道路的距離閾值。閾值通常根據概率準則來確定,即必須以一定的概率包含車輛的實際位置。按照統計理論,可首先確定一個誤差橢圓:

車輛行駛路段的確定規則如下:
規則1 當接收到電子地圖的標定信息如路徑規劃好的行車路線或者用戶自定義道路屬性類型代碼時,直接利用標定信息匹配到所規劃的道路路段上去;
規則2 IF在一定閾值內搜索到的道路數1THEN車輛不在道路上,利用概率統計算法,可根據GPS的實時定位數據建立一個動態可調的點緩沖區替代誤差橢圓,并利用誤差橢圓擴展因子的原理,設置緩沖區擴展比例因子,動態可調的緩沖區半徑按30 m,60 m,90 m和120 m四個等級由小到大逐級搜索落入緩沖區內的道路路段。在GPS定位失效的情況下,必須用DR(航位推算)定位的誤差參數來代替GPS參數,完成誤差區域的定義,以保證匹配過程的連續性。此時,要注意由于DR推算具有誤差累積效應,隨著推算過程的進行,統計模型誤差、測量誤差和各種隨機誤差將會不斷累積。因此,在按DR定位的誤差參數定義誤差橢圓后,還應乘上適當的擴展因子來擴大誤差區域,以反映誤差累積對定位精度的影響。采用裁剪算法迅速判定侯選路段,通過計算不僅可以判知落入緩沖區內的路段,還可以求得路段與緩沖區的交點,從而取得GPS定位數據的匹配點坐標;
規則3 IF在一定閾值內搜索到的道路數=1THEN利用直接投影算法,把此道路作為車輛行駛的當前道路;
規則4 在一定閾值內搜索到的道路數>1&相同的道路節點號THEN車輛行駛在道路交叉口,根據交通狀況種別A,B,C,D劃分,采取對應策略,并利用相關性算法,計算測出軌跡與1組地圖數據的相關性系數,在所有候選地圖路線中與實際測出路線相關性最高的路線即為車輛行駛的真實路線;
規則5 在一定閾值內搜索到的道路數>1&&不同的道路節點號THEN車輛行駛在距離較近的平行道路之間,采用模糊邏輯算法中的利用距離和方向要素的線性組合方法,改進算法,令p1+p2=1,并對p2參照模糊邏輯算法模式中的確定相似性度量函數的加權因子Q的模糊判決規則確定其值,然后計算基于曲線擬合的地圖匹配算法的相似性度量函數s,并選取最小值作為待匹配路段,即:在考慮角度和距離因素的情況下,該路段達到最優。
加權因子q取值如下:
規則5.1 IF道路為禁行或禁止轉向或單行道的逆向THEN q=1.5*q;
規則5.2 IF已有路徑規劃且是路徑規劃路段THEN q=0.5*q;
規則5.3 IF道路與車輛的行駛方向一致THEN q=0.25*q。
規則6 IF發現如離開道路、電子地圖簡化后較為低級的道路描述不夠詳細、車輛進入停車場等情況,找不到可以匹配的行走路段THEN手動停止地圖匹配,用接收的原始數據直接顯示,不進行誤差矯正。
3.3基于模糊邏輯的匹配路段可信度評判
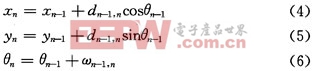
以候選路段取向與車輛行駛方向的差(△heading,單位:度)值為論域X,令μhh(X)、μhc(x)為取向差(單位:度)的值x隸屬于模糊子集路段與車輛行駛取向一致性好和路段與車輛行駛取向一致性差的隸屬度,則μhh(X)、μhc(X)可取為:


在初始位置給定時,利用DR推算能夠準確地描述出車輛在短時間內的行駛軌跡。因此,可按如下方式定義候選路段形狀與當前車輛行駛軌跡的相似度:根據DR推算原理,現時刻tn的車輛位置(xn,yn)和車輛行駛取向θn可根據上一時刻tn-1的車輛位置(xn-1,yn-1)和行駛取向θn-1按下列公式推出:
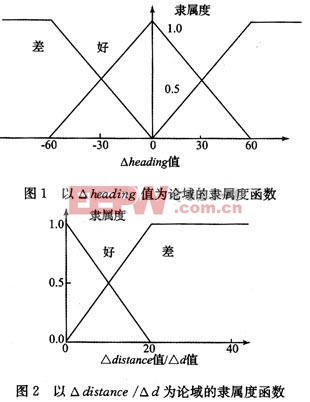
式中:dn-1,n是tn-1到tn時刻車輛行駛過的距離,ωn-1,n是tn-1到tn時刻車輛行駛取向的變化量 (dn-1,n和ωn-1,n均由車載位移傳感器和角速度傳感器提供)。取車輛當前定位位置p0(x,y)在候選路段上的投影點p′0(x′,y′)為tn時刻DR推算定位的參考位置,取候選路段取向為tn時刻的參考行駛取向,則由DR推算公式可反推出前一時刻的推算定位參考點。通過多次推算即可獲得一組參考點,具體數量可根據實際應用的要求確定。這里取參考點數目為5,則可定義候選路段與前5個單位時間內的DR定位軌跡平均距離差(單位:m)為:


上述隸屬函數的圖形如圖1和圖2所示。









評論