基于CAN總線的汽車發(fā)動機智能電子控制器研究

ECU的控制精準度除了要求采集的信號必須實時及準確外,執(zhí)行機構的運動也要精確。而在ECU控制程序中采用一些的算法則不僅可以實現(xiàn)更高的控制精度,還可以補償一些由信號采集的非實時及執(zhí)行機構運動精度不高帶來的誤差。
4ECU
通過對電噴系統(tǒng)的組成分析,我們可明顯的ECU作為控制核心的重要地位。由于控制對象的時變性和非線性,采用ECU的發(fā)動機控制系統(tǒng)已向集中控制系統(tǒng)方向發(fā)展:在控制結構上,以ECU為核心,通過CAN總線與I/O設備建立通信;在控制算法上,用模糊控制理論、PID調節(jié)、BP神經(jīng)網(wǎng)絡相結合的方法,構造穩(wěn)態(tài)控制的MAP和怠速控制的模型。圖4-1給出了電噴系統(tǒng)的控制結構。
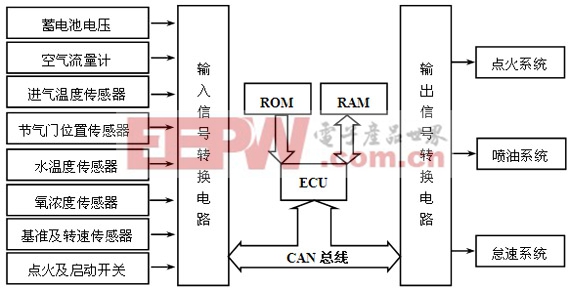
圖4-1電噴系統(tǒng)控制結構
Fig.4-1thecontrolstructureofelectronicinjectionsystem
ECU的CPU采用具有浮點運算能力的DSP芯片,而各檢測信號和驅動控制電路可采用具有A/D、開關量轉換的獨立單片機或CAN總線接口。其結構確定后,ECU的控制能力就在于控制程序的開發(fā)。由于控制狀態(tài)和策略復雜,下面以ESI為例說明。
ESI的控制核心問題是點火提前角的控制。而在不同的工況下其控制的策略是完全不同:當發(fā)動機處于啟動工況時,由于啟動速度波動大且快,不可能根據(jù)MAP圖確定點火提前角;當發(fā)動機處于暫態(tài)工況時,由于是開環(huán)控制,可直接用插值方法計算點火提前角;當發(fā)動機處于穩(wěn)態(tài)工況時,要判斷是否爆振,并據(jù)此采用閉環(huán)控制,即對上次的MAP圖值進行遞階調節(jié),以獲得最優(yōu)的點火提前角。圖4-2是點火提前角的控制程序流程圖。
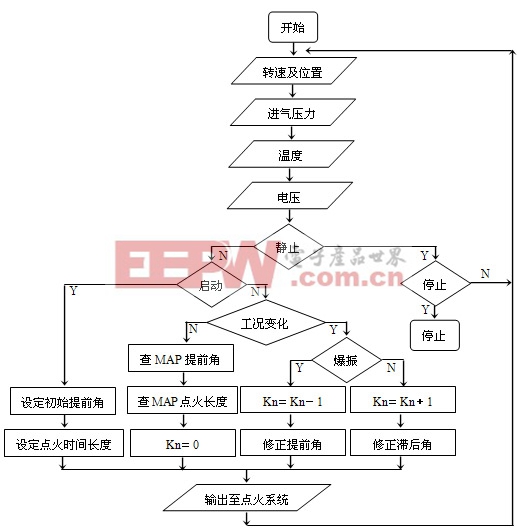
圖4-2點火提前角控制程序流程圖
Fig.4-2thecontrolprocedureflowchartofignitionangle
5結論
本文是在對現(xiàn)有系統(tǒng)以及國內外的相關研究最新科研成果的分析和總結的基礎上,提出基于CAN總線的汽車發(fā)動機智能電子控制器的設計方案,且需進一步的進行各種參數(shù)的模擬臺架實驗,最終給出各種工況的智能MAP和控制程序。

pid控制器相關文章:pid控制器原理










評論