基于GPS授時及時鐘細分的管線破壞定位

系統工作過程:在管線的相鄰四個站點上各安裝一只聲壓傳感器,探頭伸入到管道內部與管內流體相接觸,當管路中部某處遭受破壞或發生泄漏時,破壞點的特征聲波分別沿管線向兩端傳播至聲壓傳感器,聲波信號經預處理后,提取能表征此聲波信號的特征參數;當特征參數與模式訓練得到的模式特征相匹配時,立即啟動同步時鐘中斷程序并記下特征聲波到達的時刻,以便與特征聲波信號到達另外站點的時刻比較,為破壞點位置計算做好準備;特征聲波在流體中的傳播速度和各站點的時鐘同步精度決定著破壞點的定位精度,利用全球衛星定位系統(GPS)衛星的標準UTC時間,可提供TTL電平秒脈沖,通過時鐘細分處理可以獲得更加精確的秒內時間信息;貼有時間標簽的特征聲波信號經編碼以后,以GPRS無線數據設備為數據終端單元(DTU),以移動分組數據業務GPRS網絡為數據傳輸通道,并在此信道上提供TCP/IP連接,將測點的數據傳送到數據服務中心。
2.2 定位原理
當聲壓傳感器接收到特征聲波信號后,依據此特征信號傳播至上下監測站點的時間差和管內聲波的傳播速度可計算出破壞點的位置。傳播介質的壓力分布和密度分布以及介質的物理形態等因素都將影響聲波的傳播速度。另外,還要考慮流體本身的流動速度的影響,因為特征聲波向上游傳播逆著流體的流動方向,而向下游則是順著流體的流動方向,因此采用圖2所示的定位原理,具有很快的響應速度和較高的定位精度。


圖2 定位原理示意圖
其中 :
D ― 管線中兩監測站點1、2之間的距離,m;
s ― 破壞點距上游站點1的距離,m;
△s ― 監測站點1與3、2與4之間的已知距離,m;
t0 ― 聲波信號產生時刻,s;
t1,t2, t3,t4― 聲波信號傳播至站點1、2、3、4的時刻,s;
△t13,△t24 ,△t12,△t01,△t02―分別為兩站點1與3,2與4,1與2,站點1,站點2接收到聲波信號的時間差,s;
聲波沿管線向上、下游的傳播速度分別為:
v上=△s/△t13 v下=△s/△t24 (1)
根據已知條件列出定位方程:
s = v上?△t01 D- s = v下?△t02 △t12=△t01 - △t02 (2)
將式(1)代入式 (2)整理得定位公式:
s = (D?△t24+△s?△t12) / (△t13+△t24) (3)
由式(3)知,只要管線中上、下游各監測站點準確接收到貼有時間標簽的特征聲波信號,即可精確確定破壞點位置。
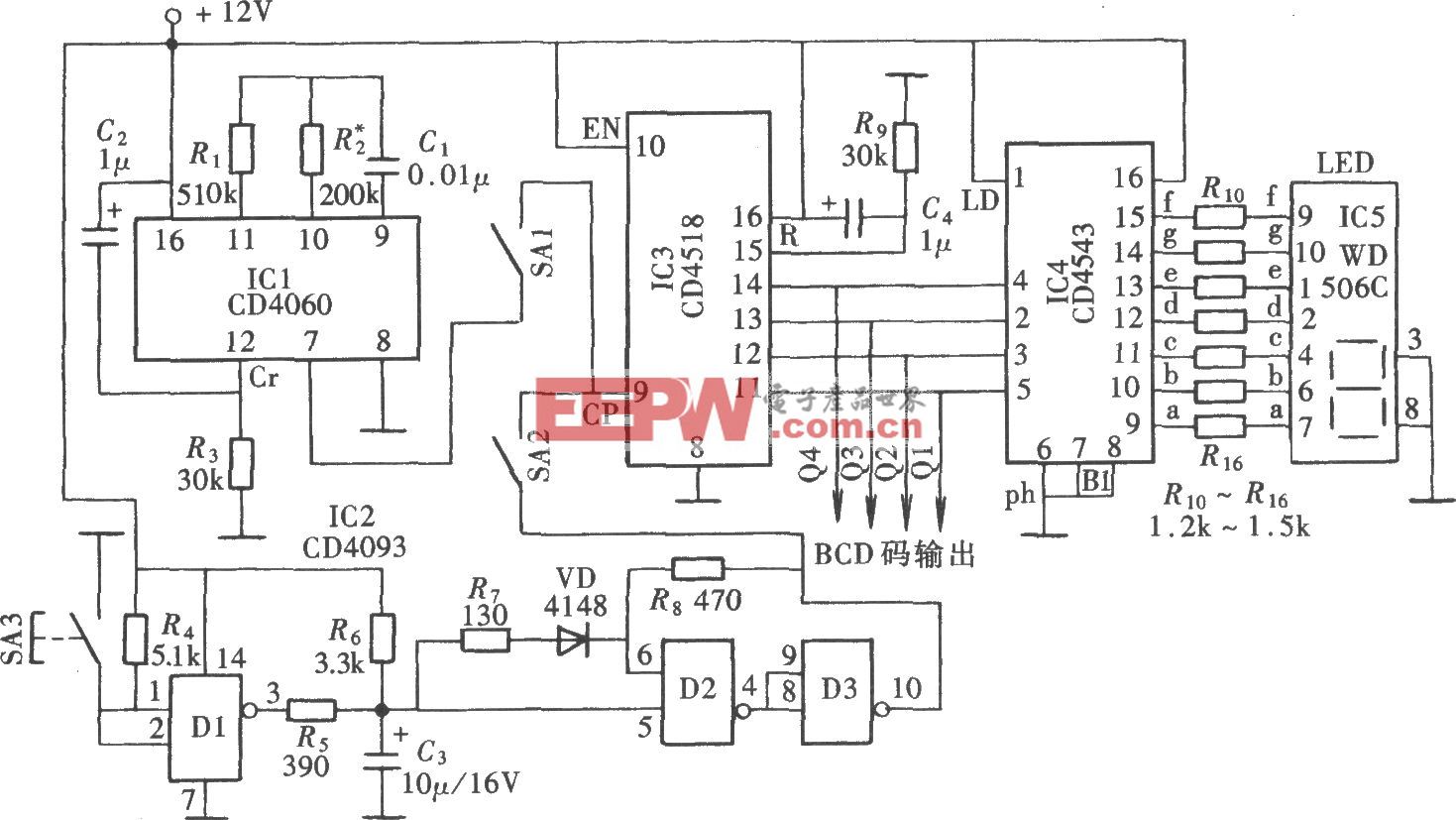
3 基于GPS基準時鐘同步與細分
3.1現場處理單元
現場處理單元是采集、處理和傳輸現場數據的遠程終端單元(RTU),包括核心處理單元、聲壓傳感器、聲音識別單元、GPS接收裝置以及GPRS數據無線通訊裝置等。圖3為現場處理單元的各部分硬件連接關系。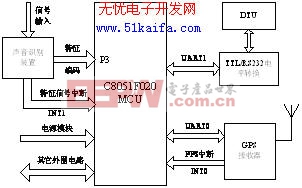
圖3 RTU系統硬件組成結構框圖
現場處理單元利用C8051F020單片機控制實現,不用另行擴展串口、ROM以及RAM。MCU有兩個硬件串口,這兩個串口的波特率產生是獨立的,而且不占用定時器,使用起來相當靈活,分別對GPS授時模塊和GPRS DTU通信。GPS模塊把時間信息以固定的格式從串口發出,MCU接收GPS模塊送來的數據,解析出其中有用的時間數據進行封裝,然后以規定的格式通過第2個串口交給GPRS DTU,利用GPRS網絡將數據送上Internet網。
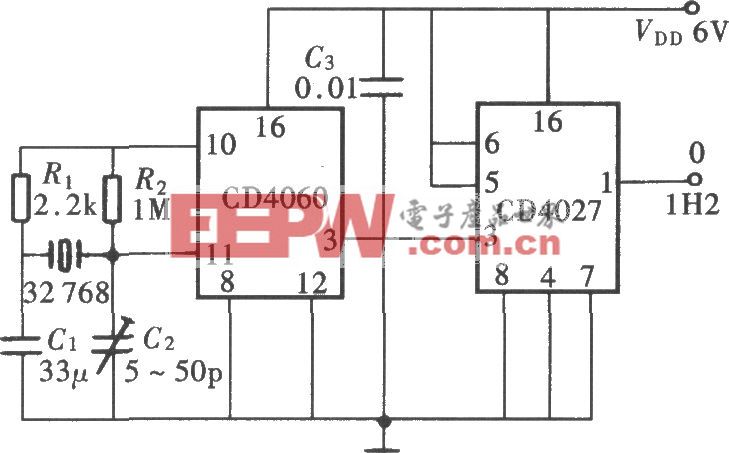
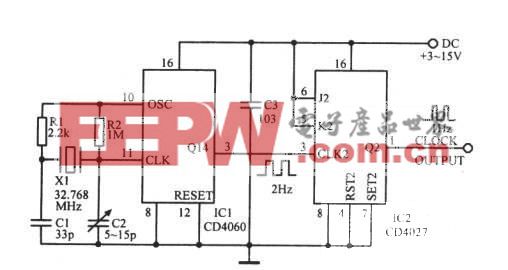
3.2 GPS基準時鐘同步
破壞點定位需要已知特征聲波信號傳播至上下游各站點的時刻,顯然,如果想得到準確的時間差 ,必須保證用于分析的數據其起始時間保持一致。否則,即使能夠準確捕捉到聲波的到達時刻,也會因為信號的起始時間不一致而得到有偏差的 。站點采樣時刻不同步,以此計算出的時間差就毫無意義,更談不上精確定位。因此,選用一個精度較高的授時系統以提供各站點的統一時間非常重要。
常規時鐘頻率產生方法都存在一定的問題,定位精度不能滿足要求。如晶體會老化,易受外界環境變化影響;原子鐘長期使用后也會產生偏差,需要定時校準。在本設計中,解決這一問題的途徑是利用全球定位系統(GPS)為各站點統一授時,保證各站點時鐘同步,同時在采集到的數據內加入其被采集到的時間信息,從而減少誤差。
GPS向全球范圍內提供定時和定位的功能,全球任何地點的GPS用戶通過低成本的GPS接收機接受衛星發出的信號,獲取準確的空間位置信息、同步時標及標準時間[4]。在本系統設計中,將遠程終端裝置RTU嵌入GPS信號接收裝置,定時校準采樣時鐘,各遠程終端裝置都以校準的采樣時鐘為采樣依據,徹底解決了分布系統的系統時鐘不同步問題。
選用Trimble Lassen SQ/IQ GPS接收模塊,使用NEMA0183格式的GPZDA數據信息。當GPS接收器與GPS時鐘同步后,即會接收到信息。其格式為$ GPZDA,hhmmss.ss,xx,xx,xxxx,,*hh。信息包含時,分,秒,日,月,年以及加和校驗等。







評論