某新型火炮隨動系統的性能測試系統設計

將轉速信號送入EVB的CAP6引腳,選擇定時器3作為其獨立時間基準,采用中斷的方式捕獲計數值,實現對轉速信號的測量。本系統時鐘頻率為40 MHz,計數器最大計數為OxFFFF,即65535,而方位、高低執行電機的頻率范圍大致為1~600 Hz。為使精度最高,將通用定時器控制寄存器T3CON的TPS2~TPSO設置為0ll,選8分頻,則定時器3每隔T=8/40 MHz=0.2 ms計數一次。測速主程序如圖5所示。本文引用地址:http://www.104case.com/article/197654.htm
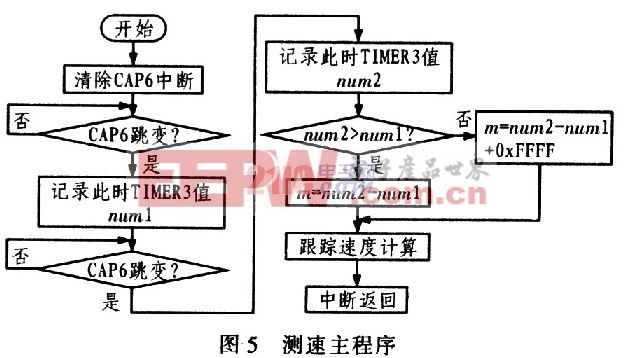
進入捕獲中斷子程序后,首先清CAP6中斷標志位,從2級深度FIFO中依次讀出兩次捕獲的計數值numl和num2,進而可得在被測信號的一個周期內定時器T3的脈沖數m。如果num2大于numl,則直接相減之差即為脈沖數m;若num2小于numl。則說明在計數過程中有計數溢出,即計數
到周期寄存器T3PR內寫入0xFFFF后回零重新計數,因此再求脈沖數m=num2-numl+OxFFFF。則可得電動機轉速信號大小為n=60 m/zT,其中,m為一個周期內的定時器T3脈沖數,z為霍爾傳感器的磁鋼數,T為定時器采樣周期。根據執行電機轉速和跟蹤速度關系可推導出隨動系統的跟蹤速度,再經數字積分和微分運算就可得到系統的角位移和角加速度。
4 實驗結果
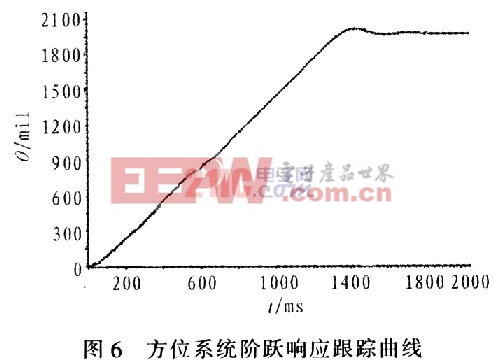
在完成了整個測試系統各部分硬件和軟件設計調試之后,將編寫好的軟件燒入LF2407A板的Flash中,然后對火炮隨動系統進行性能測試。這里僅以測試火炮隨動系統的動態性能為例。利用正弦機給定方位系統θ=2000密位的階躍響應,在整個系統運行時,由LF2407A每20 ms記錄一次系統的角位移,每次記錄采樣100點,利用DSP的集成開發工具CCS2000采用描點法對記錄數據進行處理,可以方便顯示出時間與角位移的關系,如圖6所示。由響應跟蹤曲線可看出最大峰值時間為1.4015 s,超調量為0.8692%,上升時間1.3689s,過渡時間1.334s。由以上數據可以看出隨動系統在階躍響應下具有很好的響應快速性,跟蹤測試能夠達到預期的精度。
5 結論
測試系統以TMS320LF2407A為核心處理器,借助DSP高速的處理速度、強大的數據處理功能,有足夠的時間完成數據采集、數據處理分析和數據傳輸等任務。系統數據傳輸采用CAN現場總線,增強了系統的開放性和通信的可靠性,并且有良好的可擴展性。該系統在實際檢測中已經得到了可靠性檢測,效果良好。






評論