某新型火炮隨動系統的性能測試系統設計

2.2 CAN總線通信接口電路
內置于LF2407A的CAN總線控制器可以用來完成CAN總線通信協議CAN2.0B的物理層和數據鏈路層的全部功能。LF2407A的CAN控制器是一個16位的外設模塊,具有以下特性:提供6個郵箱對象,其數據長度為O~8個字節;針對郵箱O、l和2、3有局域接收屏蔽寄存器;可編程波特率;可編程中斷配置;可編程的CAN總線喚醒功能;總線錯誤診斷功能;自測試模式。本文引用地址:http://www.104case.com/article/197654.htm
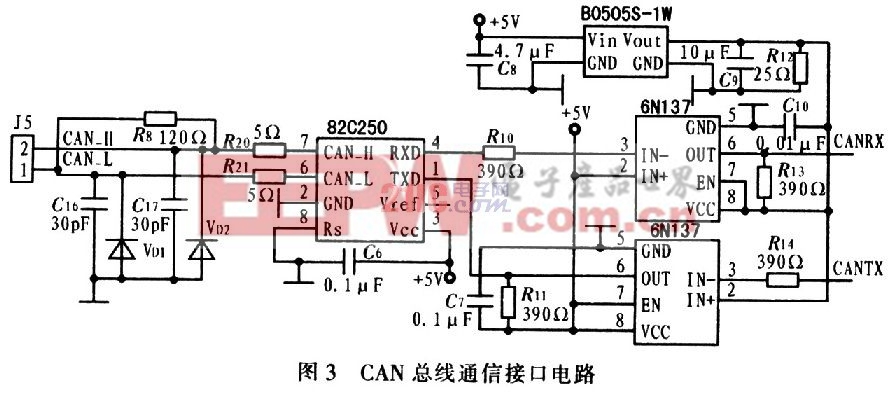
CAN總線通信的硬件電路如圖3所示。為了進一步提高系統的抗干擾能力并保護DSP器件,在LF2407A控制器和收發器PCA82C250之間增加了由高速光電隔離器6N137構成的隔離電路,實現了總線上各節點間的電氣隔離。光耦部分電路所采用的兩個電源必須完全隔離,故電源模塊采用B0505S-lW現場總線專用的電源模塊。PCA82C250通過引腳8與地直接相連,采用高速方式,因此系統用屏蔽雙絞線進行數據傳輸,30 m以內可以提供1 Mb/s的傳送速率,且必須在雙絞線兩端連接兩個120 Ω的匹配電阻來消除長線反射所引起的干擾。
3 測試系統應用軟件設計
3.1 軟件總體設計
TMS320LF2407A的軟件設計和調試是在DSP集成開發環境CCS2000下進行的,采用C語言和匯編語言相結合的方式編寫,在軟件功能調試完成后,就可以將程序固化在片內的Flash內,在上電時加載程序。
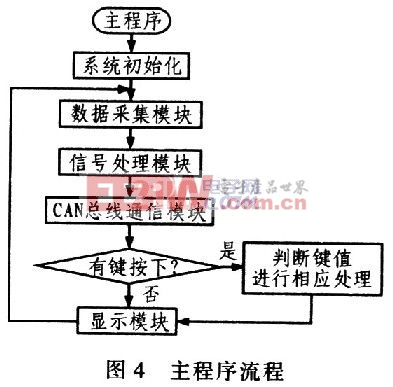
系統軟件設計的主要流程如圖4所示,首先系統程序進行初始化,啟動DSP定時器和捕獲單元,采集轉速傳感器輸出的信號,然后對采集數據進行處理分析,DSP與CAN控制器之間以響應中斷方式實現通訊。經過數據處理后的數據送給LCD顯示,以對數據進行保存和分析,并掃描有效按鍵,判斷鍵值,并進入相應的處理。
3.2 數據采集模塊
霍爾式傳感器輸出的轉速信號為脈沖信號,則對脈沖信號的頻率進行測量即可測出轉速的大小。利用LF2407A器件上的事件管理器(Event Manager)模塊帶有的通用定時器和捕獲單元可完成計數和測量計算任務。






評論