基于CAN總線的自動離合器控制器設計

3.2 CAN 通信協議設計
CAN 通信協議包括物理層、數據鏈路層和應用層。物理層和數據鏈路層是通過硬件實現的, 在使用CAN 通信時, 需要開發者自行定義應用層協議。構造應用層協議的主要任務是ID 分配、定義消息周期、確定信號與消息的映射關系。設計要考慮的主要因素有數據傳輸的實時性要求、數據的相對重要程度、與數據相關的應用控制算法對數據的時間要求等。國際上存在一些現有的標準, 如CANopen 、SAE J1939 等。
在一些利用簡單的通信協議就可以滿足要求的情況下, 采用復雜的協議會造成資源浪費, 用戶在應用時也會覺得諸多不便, 反而限制了靈活性。本文設計的CAN 總線網絡中僅有離合器控制器和發動機控制器兩個節點。針對僅有兩個節點的實驗平臺, 本文從協議實現的代碼量、目標系統的信息量、軟件的開發成本等角度出發, 定義一種簡單可靠的CAN 協議。具體的通信協議定義如表2 所示, 標識符用來表示信息的優先級, 標識符越小優先級越高。
表2 CAN 總線通信協議

4 CAN 通信測試實驗
本文實驗是在自行搭建的離合器模擬實驗平臺上進行的。本實驗平臺是由離合器控制板、加速踏板、剎車踏板、相關傳感器、離合器執行機構及發動機模擬控制板組成。離合器控制板與發動機模擬控制板之間通過CAN 總線通信。圖5 為實驗過程中通過CAN 總線傳送的檔位變化信息, 圖6 為通過CAN 總線傳遞的加速踏板開度信號。
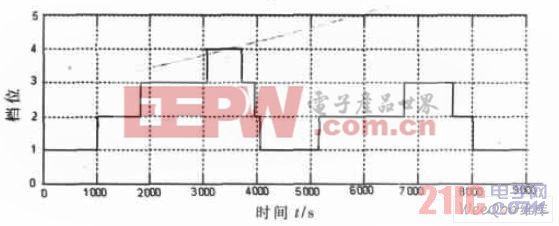
圖5 檔位信息
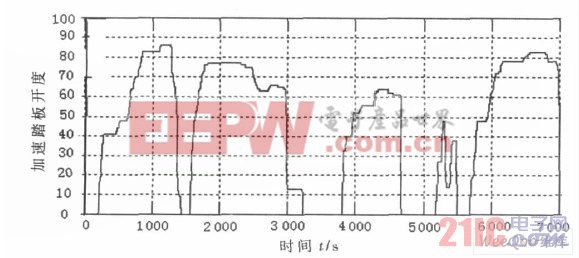
圖6 加速踏板開度信號
本文提出了一套電控自動離合器的控制器方案, 并進行了系統的軟硬件開發, 初步實現了自動離合器的基本功能, 設計了CAN 總線接口。在實驗平臺上驗證了控制器方案及CAN 通信模塊的可行性和可靠性, 為實車試驗打下基礎。











評論