基于GPS和GSM的車輛自動跟蹤系統

2.2 GPS數據采集部分
GPS模塊采用瑞±u-blox公司的NEO-5Q主芯片,該芯片采用u-blox最新的KickStart微弱信號攫取技術,能確保采用此模組的設備在任何可接收到信號的位置及任何天線尺寸都能夠有最佳的初始定位性能并進行快速定位,且具有成本低廉,體積小,功能強等優點。本文引用地址:http://www.104case.com/article/197314.htm
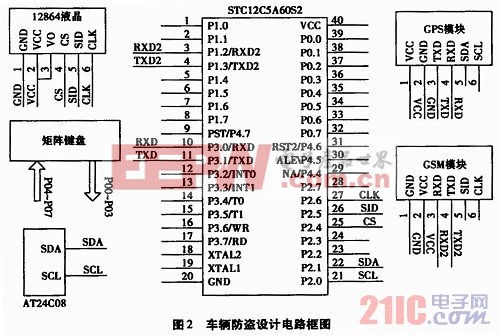
單片機與GPS模塊的連接如圖2所示,采用了串口通訊的方式,模塊在上電后,會實時接收GPS數據包,數據包的類型有:GPCSV:可見衛星信息;GPGLL:地理定位信息;GPRMC:推薦最小定位信息;GPVTG:地面速度信息;GPGGA:GPS定位信息;GPGSA:當前衛星信息等。設計中,只對GPPMC型數據包進行解析,數據包的內容為:$GPRMC,1>,2>,3>,4>,5>,6>,7>,8>,9>,10>,11>,12>*hh
1>UTC時間,hhmmss(時分秒)格式
2>定位狀態,A=有效定位,V=無效定位
3>緯度ddmm.mmmm(度分)格式(前面的0也將被傳輸)
4>緯度半球N(北半球)或S(南半球)
5>經度dddmm.mmmm(度分)格式(前面的0也將被傳輸)
6>經度半球E(東經)或W(西經)
7>地面速率(000.0~999.9節,前面的0也將被傳輸)
8>地面航向(000.0~359.9度,以正北為參考基準,前面的0也將被傳輸)
9>UTC日期,ddmmyy(日月年)格式
10>磁偏角(000.0~180.0度,前面的0也將被傳輸)
ll>磁偏角方向,E(東)或W(西)
12>模式指示(僅NMEA0183 3.00版本輸出,A=自主定位,D=差分,E=估算,N=數據無效)












評論