智能型隨機(jī)檢測(cè)客車(chē)超載系統(tǒng)

目前客車(chē)超載運(yùn)行是交通控制中要解決的首要問(wèn)題。本設(shè)計(jì)可通過(guò)行政干預(yù)等手段,應(yīng)用在客車(chē)超載的檢查之中,方便了交警的工作[1]。
本文引用地址:http://www.104case.com/article/197064.htm系統(tǒng)設(shè)計(jì)通過(guò)單片機(jī)和傳感器的組合電路實(shí)現(xiàn)對(duì)客車(chē)超載的檢查和控制。該檢測(cè)系統(tǒng)能夠自動(dòng)檢查車(chē)輛內(nèi)乘客數(shù)目并顯示出來(lái),當(dāng)車(chē)內(nèi)人員超載時(shí),發(fā)出語(yǔ)音提示,并自動(dòng)關(guān)閉汽車(chē)啟動(dòng)裝置,使之無(wú)法運(yùn)行,保障了行車(chē)安全。
1 系統(tǒng)組成
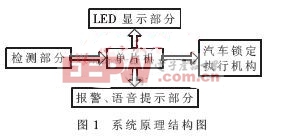
系統(tǒng)組成框圖如圖1所示。
2 系統(tǒng)原理分析
本設(shè)計(jì)充分利用PIC16F877單片機(jī)的易編程和驅(qū)動(dòng)能力強(qiáng)等特點(diǎn)[2],通過(guò)查詢指令產(chǎn)生中斷實(shí)現(xiàn)系統(tǒng)的顯示、語(yǔ)音報(bào)警和汽車(chē)發(fā)動(dòng)機(jī)鎖定等功能。
2.1 傳感器檢測(cè)和信號(hào)放大濾波部分的設(shè)計(jì)
該部分的設(shè)計(jì)采用了兩個(gè)反射式光電眼,安裝在客車(chē)的車(chē)門(mén)處適當(dāng)位置,根據(jù)乘客經(jīng)過(guò)車(chē)門(mén)時(shí)遮擋兩個(gè)電子眼發(fā)出的紅外光的不同時(shí)序,通過(guò)單片機(jī)判別乘客是上車(chē)還是下車(chē)。該部分的硬件電路設(shè)計(jì)總體電路圖如圖2所示。
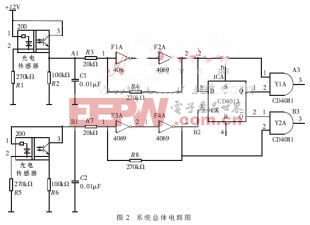
在圖2的電路中,F(xiàn)1A~F4A是用CMOS集成的六反相放大器CD4069組成的放大濾波部分電路;ICA是CD4013構(gòu)成的CMOS雙D觸發(fā)器,Y1A、Y2A是CD4081四個(gè)2輸入端與門(mén),這兩部分與4069輸出的兩路傳感器檢測(cè)信號(hào)進(jìn)行邏輯運(yùn)算,最后在Y1A和Y2A的輸出端輸出合適的電平信號(hào),分別送至PIC單片機(jī)的T0CKI腳和T1CKI腳(即計(jì)數(shù)器0和計(jì)數(shù)器1的時(shí)鐘輸入端)。
兩個(gè)傳感器的安裝位置之間要有一定的距離(30cm~50cm之間),當(dāng)無(wú)人經(jīng)過(guò)傳感器時(shí)(以下用E1和E2表示傳感器),紅外二極管發(fā)出的紅外光照射不到光電三極管上,送給單片機(jī)的信號(hào)一直是不變的低電平,系統(tǒng)不會(huì)計(jì)數(shù)。當(dāng)有人上車(chē)時(shí),先遮擋住E1,則E1的紅外二極管發(fā)出的光照射在人身上,反射到受光三極管上,電路中的A1點(diǎn)產(chǎn)生一個(gè)高電平信號(hào),經(jīng)過(guò)放大濾波、邏輯運(yùn)算最后在A3端輸出一個(gè)低電平信號(hào)。隨后人體全部遮擋E1和E2,然后是離開(kāi)E1遮擋住E2,最后離開(kāi)。由此類(lèi)推在整個(gè)上車(chē)的過(guò)程中A3點(diǎn)的電平是高低變化的,即一個(gè)上車(chē)脈沖信號(hào),送至PIC單片機(jī)的STATUS寄存器進(jìn)行加計(jì)數(shù),而此時(shí)B3點(diǎn)的輸出狀態(tài)是不變的。具體的檢測(cè)方法和脈沖產(chǎn)生時(shí)序如圖3所示。
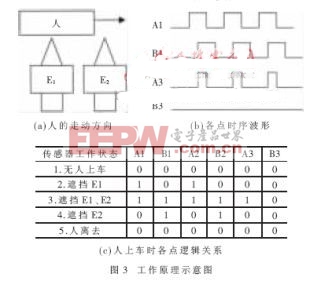
當(dāng)人下車(chē)時(shí)則是把這個(gè)遮擋順序反過(guò)來(lái),B3點(diǎn)產(chǎn)生的脈沖時(shí)序是相反的,信號(hào)送至PIC單片機(jī)的STATUS寄存器進(jìn)行減計(jì)數(shù),單片機(jī)即可通過(guò)程序模擬把車(chē)廂內(nèi)實(shí)際人數(shù)計(jì)算出來(lái)并存儲(chǔ)在寄存器中。
2.2 顯示部分的設(shè)計(jì)
由于PIC16F877單片機(jī)的I/O口驅(qū)動(dòng)能力較強(qiáng),所以顯示部分的電路采用PIC16F877單片機(jī)直接驅(qū)動(dòng)兩位共陽(yáng)極LED數(shù)碼管的方式[3]。
RC6和RC7端口分別控制數(shù)碼管的十位和個(gè)位的供電,當(dāng)相應(yīng)的端口變成低電平時(shí),驅(qū)動(dòng)相應(yīng)的三極管會(huì)導(dǎo)通,+5V通過(guò)IN4148二極管和驅(qū)動(dòng)三極管給數(shù)碼管相應(yīng)的位供電,這時(shí)只要RB7口送出數(shù)字的顯示代碼,數(shù)碼管就能正常顯示數(shù)字。
2.3 語(yǔ)音報(bào)警部分的設(shè)計(jì)
該部分主要采用美國(guó)華邦公司10分鐘規(guī)格的ISD4004語(yǔ)音芯片,由PIC16F877 SPI模塊的RC3、RC5端口直接驅(qū)動(dòng),電路簡(jiǎn)單、不怕掉電、發(fā)音清晰、存儲(chǔ)量大、編程方便,可以適應(yīng)客車(chē)上的環(huán)境。
由于ISD使用的是3V電源,而PIC使用的是5V電源,因此電路設(shè)計(jì)中,在單片機(jī)的I/O口輸出時(shí),采用了先串接10kΩ電阻再接到ISD的SPI口的方式;而MIS0口是由ISD輸出、PIC16F877輸入的,為了使PIC16F877能準(zhǔn)確識(shí)別其電平,電路設(shè)計(jì)中在MIS0腳加了一只NPN三極管接成的反相器,向PIC16F877的MIS0性質(zhì)的RC4腳提供足夠電壓,所以在程序中應(yīng)該把MIS0的所有讀入信號(hào)取反。
為了方便語(yǔ)音錄入,在ISD4004的17腳加了一個(gè)麥克風(fēng),由于語(yǔ)音芯片自身的采樣頻率較高,所以不需要另外接AGC電路,就可以錄入較為清晰的語(yǔ)音。
ISD4004的語(yǔ)音輸出經(jīng)電容耦合濾波后,接至音頻功率放大器芯片TDA2822放大就由揚(yáng)聲器播放出來(lái)。
2.4 發(fā)動(dòng)機(jī)鎖定部分的電路設(shè)計(jì)
因?yàn)榭蛙?chē)發(fā)動(dòng)機(jī)采用的是汽油機(jī),汽油機(jī)的燃燒方式是靠火花塞點(diǎn)燃式,而火花塞的跳火是由于安裝在分電器中的信號(hào)發(fā)生器發(fā)出信號(hào),點(diǎn)火模塊依據(jù)收到的信號(hào)發(fā)生器的信號(hào)來(lái)接通和切斷點(diǎn)火系的初級(jí)電路,點(diǎn)火系的次級(jí)電路感應(yīng)初級(jí)電路電壓的變化而產(chǎn)生高壓點(diǎn)火。因此,對(duì)于汽油發(fā)動(dòng)機(jī)只要執(zhí)行電路切斷點(diǎn)火電路的低壓電路,高壓電路就不會(huì)感應(yīng)出電火花來(lái)點(diǎn)燃混和氣了。
本設(shè)計(jì)中,根據(jù)PIC16F877單片機(jī)檢測(cè)到的是否超載的信號(hào),在I/O口輸出一個(gè)高或低電平信號(hào),放大后驅(qū)動(dòng)電磁閥的開(kāi)閉來(lái)控制點(diǎn)火電路的低壓電路。
3 軟件設(shè)計(jì)
3.1 計(jì)數(shù)功能程序?qū)崿F(xiàn)
該部分程序的主要功能是將傳感器檢測(cè)到的兩路上下車(chē)信號(hào)送至PIC單片機(jī)的STATUS寄存器以進(jìn)行加減計(jì)數(shù),將實(shí)時(shí)的數(shù)據(jù)和預(yù)置在W寄存器的上限人數(shù)(如50人)循環(huán)不間斷地進(jìn)行查詢比較,一旦等于50則產(chǎn)生中斷控制語(yǔ)音芯片進(jìn)行語(yǔ)音報(bào)警,大于50則執(zhí)行發(fā)動(dòng)機(jī)鎖定電路。
3.2 LED顯示部分的程序?qū)崿F(xiàn)
該部分程序的主要功能是對(duì)單片機(jī)的顯示控制位進(jìn)行查詢并查表,使數(shù)碼管的高位和低位能不斷刷新,達(dá)到實(shí)時(shí)顯示客車(chē)上人數(shù)的目的。
3.3 語(yǔ)音部分的軟件控制程序設(shè)計(jì)
該部分程序的主要功能是不斷地查詢PIC16F877的SPI片選位RA5和語(yǔ)音控制位RC5,一旦有中斷信號(hào),則由單片機(jī)的SPI模塊從語(yǔ)音芯片的存儲(chǔ)器中讀出對(duì)應(yīng)的預(yù)先錄制好的語(yǔ)音程序。
3.4 軟件控制程序設(shè)計(jì)流程圖
系統(tǒng)的軟件控制程序設(shè)計(jì)流程圖如圖4所示。

本文研究的智能型隨機(jī)檢測(cè)客車(chē)超載系統(tǒng)采用光電傳感器和PIC單片機(jī)共同構(gòu)成超載檢測(cè)和處理結(jié)構(gòu),驅(qū)動(dòng)電磁閥控制發(fā)動(dòng)機(jī)的點(diǎn)火電路實(shí)現(xiàn)超載控制。現(xiàn)代交通系統(tǒng)中有著復(fù)雜的傳感器網(wǎng),傳感器是電子控制系統(tǒng)的“眼睛”和“耳朵”[6],它告知計(jì)算機(jī)系統(tǒng)檢測(cè)車(chē)速、車(chē)重、實(shí)時(shí)交通狀況等交通信息,大大提高了交通管理的效率。另一方面汽車(chē)自身配置的傳感器裝置使汽車(chē)運(yùn)行狀態(tài)的相關(guān)參數(shù)以光速反饋至計(jì)算機(jī)控制系統(tǒng),使系統(tǒng)做出合理的調(diào)整。這些共同構(gòu)成了智能化的交通系統(tǒng),也是未來(lái)交通系統(tǒng)的發(fā)展方向。







評(píng)論