固定閾值在超聲波測距車載應用中的使用

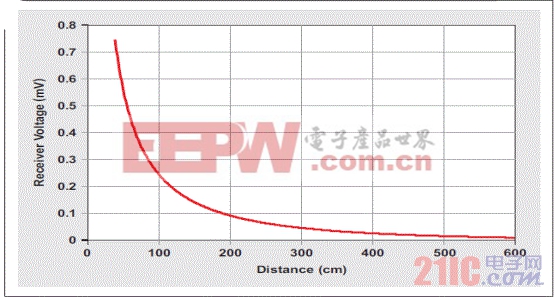
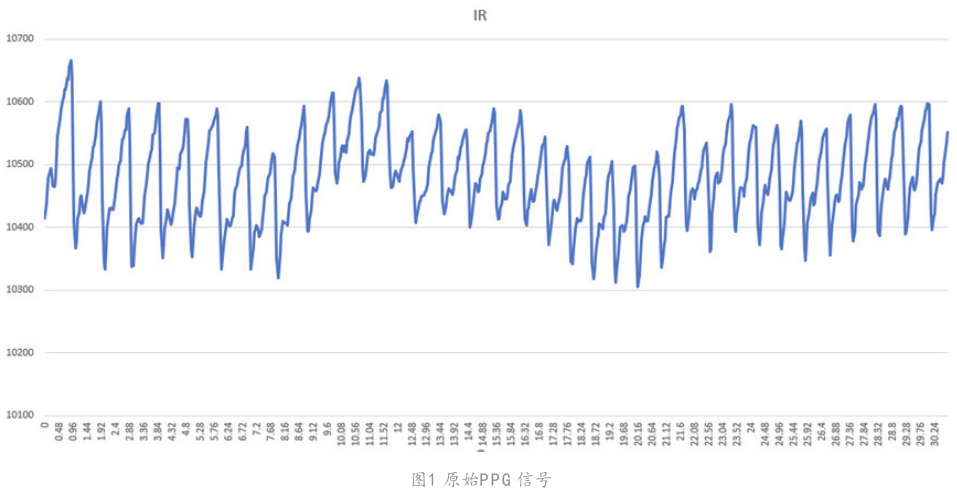
圖 2 接收機電壓為物體到傳感器距離的函數
可變閾值方案
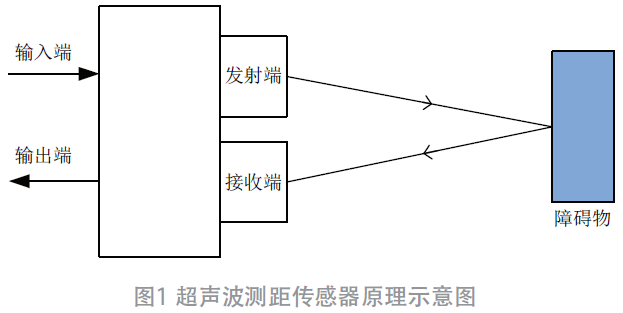
前一小節表明,從物體接收到的回波的振幅,會隨物體到傳感器的距離增加而減小。另外,由圖1我們知道,回波處理路徑的輸入信號為u(t) = s(t) + η(t),其中s(t)為回波信號,而η(t)為輸入相關噪聲。換句話說,回波信號振幅不僅隨距離增加而減小,并且會被噪聲破壞,而回波處理系統只能通過處理回波信號來探測某個物體的存在。選擇閾值時,一種常用的方法是閾值方案。使用這種方法時,閾值隨時間而變化。特別是,超聲波剛被發射出來時,閾值較大,之后,隨著經過時間的增加而減小。這種方法的基本原理是,利用信號振幅的可預測衰變,確定閾值大小:越靠近物體,回波和閾值越大,從而實現物體探測。離物體越遠,回波和閾值就越小。
圖3描述了可變閾值方法的概念。該圖顯示了不同距離時物體回波解調舉例。TI PGA450-Q1 評估模塊的一個測試裝置用于收集波形數據。該圖顯示了一種可能的閾值方案。
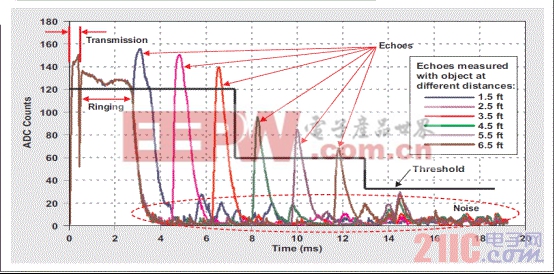
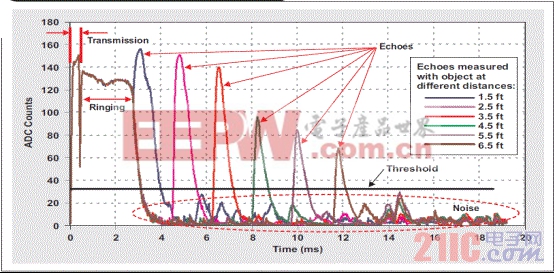
圖 3 一個可能閾值方案的解調回波信號波形
盡管這種可變閾值方案方法原則上有效,但它存在兩個缺點:
1、 可變閾值方案要求器件內部有存儲器,以將時間與閾值關系存儲至方案表中。如果閾值有 3 個可能的取值(如圖 3 所示),則該表就會有 6 種可能的輸入。另外,對于車載中使用的高級駕駛員輔助系統 (ADAS) 來說,用戶需要輸入多種可能的傳感器安裝位置,因為傳感器可以安裝于車載保險杠或者后視鏡上任何位置。例如,如果一個傳感器有 10 個可能的安裝位置,那么器件就需要存儲多達 60 個位置數據。這就增加了器件的成本,因為要求使用更多的存儲空間。
2、 在車載保險杠和反視鏡上安裝好傳感器后,系統制造廠商會“校準”方案表。校準過程就是確定各個閾值,以及切換閾值的時間。這種校準通常是一項耗時費錢的工作,特別是一個表中需要多個輸入數據時更是這樣。
總之,可變閾值方案的主要缺點是,它增加了超聲波測距系統的總成本。
固定閾值
可變閾值方法使用基于時間變化的閾值,與這種方法不的同是,固定閾值方法將信號噪聲用作基線。系統噪聲用于確定閾值,這樣物體不存在就不對其進行探測。
另外,由圖 1 我們知道,回波處理路徑輸入信號為 u(t) = s(t) + η(t)。回波信號是一系列載波頻率 fc(t) 下的正弦波脈沖,其計算方法如下:
其中,S 為回波信號振幅。因此,方程式 10 給出了放大信號的 RMS 值:

請注意,這種一連串的脈沖僅短暫出現,從而讓信號振幅看似受到長時間調制。
帶通濾波器 (BPF) 的y (t) 輸出可以表示為:
其中,ƒ(BPF) 為 BPF 的數字濾波器函數,而ƒ(ADC) 為 ADC 的量化函數。假設回波信號的基準時間為 t0 = 0(通常為發射器發射超聲波的時間),則 y(t) L、tend t tobject 和 y(tobject) ≥ L,并且 tend 大于零且為所發射脈沖初始脈沖群的末尾時,則可以聲明 tobject 時探測到物體的存在。問題是,“我們可以選擇使用一個固定閾值,棄用可變閾值方案嗎?”要回答這個問題,我們可以利用方程式12,并假設t為一個瞬間值,從而照顧到各個噪聲組成部分:
變量定義如下:
K=放大器增益
ηext(t)=外部噪聲
ηamp(t)=放大器噪聲
ηADC(t) = ADC電路噪聲
q(t) = ADC量化
ηBPF(t) =BPF計算數學誤差
各個噪聲組成部分彼此不相關。另外,我們假設每個噪聲組成部分為零平均值和非零方差高斯。
把方程式9和12代入方程式11后,BPF輸出變為:
根據方程式9,BPF噪聲的RMS為:
其中,Q 為 BPF 的品質因數,fs 為 ADC 采樣頻率,而所有噪聲項均為 RMS值。知道方程式 14 所表示噪聲的 RMS,并假設 6.6 波峰因數的情況下,所選閾值為:

上述方程式可以表示為:
換句話說,我們可以利用方程式 15 選擇固定閾值。圖 4 顯示了使用固定閾值的舉例回波響應。



評論