淺談K線診斷協議驅動器的設計

k_curmsg.done=1;
}
}else{
k_curmsg.checksum=ch;
k_curmsg.done=1;
}
break;
} if((k_REQ==k_drvhandle.mode)(k_FMT!=k_curmsg.state)){
TimerStart(k_REP_P4MS,k_TP4,0,1);
}
}
2.2 初始化
在開始診斷服務之前,診斷儀必須對ECU進行初始化,通過ECU的響應獲取ECU支持的報文頭格式和定時參數,建立診斷通訊【4】。初始化過程如圖1所示,診斷儀發送一個25ms ’0’、25ms’1’的WuP(WakeUp Pattern),然后發送STC(StartCommunication) Request,ECU檢測出WuP并接收到正確的STC Request后返回STC Response,該報文的Data字段為由兩個字節構成的“關鍵字(Key Word)”,指定了ECU所支持的報文頭和定時參數信息,如Key Word指定為0x8fea即表示在報文頭中采用附加長度信息Len表示數據字段長度,同時采用默認的定時參數。
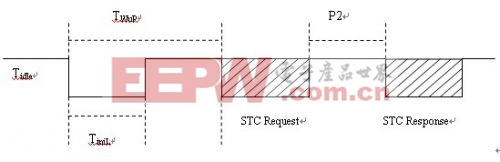
圖1 初始化過程
初始化之前K線處于空閑狀態,ECU禁止SCI功能并使能SCI的RXD引腳為IO模式,檢測到下降沿時通過定時器統計RXD引腳的IO低電平的持續時間,檢測到上升沿時開始統計RXD引腳的IO高電平持續時間,判斷是否為有效的WuP;也可以設置SCI的波特率為200bps,判斷是否能接收到數據0xf0(0xf0在總線上表現為5個0,5個1),檢測出正確的WuP后,使能SCI功能,設置波特率為10400bps,等待診斷儀發送的STC Request,接收到請求后返回STC Response肯定響應,建立診斷通訊。
2.3 定時管理
ISO14230定義了4個定時參數管理字節間定時和報文間定時,診斷儀和ECU需要共同遵守這些定時約束以保證正常的診斷通訊,表2給出了這4個定時參數的含義及取值區間。
參數變量描述最小值(ms)最大值(ms)
P1ECU響應的字節間時間間隔020
P2診斷儀請求和ECU響應之間的時間間隔,或兩個ECU響應之間的時間間隔2550
P3ECU響應和診斷儀請求之間的時間間隔555000
P4診斷儀請求的字節間時間間隔020
表2 定時參數
P1和P4是報文內字節間定時,P2和P3為報文間定時。診斷儀在初始化完成后或接收到診斷響應后需要在P3時間內發送診斷請求,否則ECU端退出診斷會話,斷開診斷通訊,K線協議驅動器重啟,等待診斷儀發出下一個WuP和STC Request。ECU在接收到診斷請求后,需要在P2時間內返回診斷響應, P2由ECU控制,通常采用25ms的固定值,當診斷請求報文中的Fmt字段指定目標地址為“功能地址”時,P2的取值需要用一個隨機數發生器來產生,因為對于功能尋址的診斷儀請求來說,可能多個ECU都會返回響應,如果采用固定的P2參數的話,可能會因為多個ECU競爭總線而出現總線沖突問題,P2采用隨機數,ECU不會在同一時間返回響應,從而避免了總線競爭問題。
協議驅動器在Vector公司的CANoe軟硬件平臺上進行測試,進行基于K線的KWP2000服務測試時,將KWP2000.dll和KLineCPL.dll模塊加入CANoe仿真環境,CANoe模擬診斷儀節點,并使用一個代理節點來實現CAN網絡和K線之間的報文轉發,此時CANoe使用計算機的串口,并通過串口/K線轉換器與ECU相連,診斷實現框架如圖2所示。
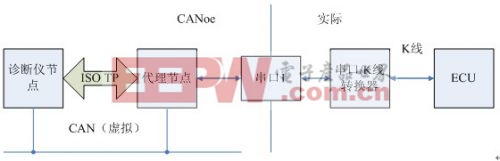
圖2 K線診斷框架
與CAN總線診斷不同的是,K線診斷需要診斷儀通過初始化過程和ECU建立診斷通訊,診斷通訊的建立如圖3所示。建立診斷通訊后便可以像CAN診斷一樣進行診斷服務了,這方面論文很多,在此不再贅述。
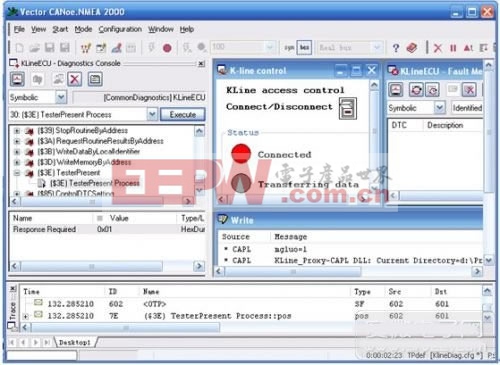
圖3 建立診斷通訊
結語
本文實現的K線協議驅動器模塊經過嚴格測試, 能夠高效完成K線診斷,性能和穩定性達到預期設計要求。驅動器獨立于處理器和操作系統,具有良好的通用性和靈活性,可以方便得集成到應用程序中,具有很高的實用價值和借鑒意義。










評論