基于ATmega16的汽車側滑檢測裝置的設計

3 軟件部分設計
本系統需要軟件對其AD轉換的結果進行分析并顯示,而且是需要采集滑動板在汽車行駛過程中的最大值,以確定汽車的側滑量,而且需要對得出的數據進行對應的轉換之后再顯示。軟件的流程圖如圖5所示。本文引用地址:http://www.104case.com/article/196127.htm
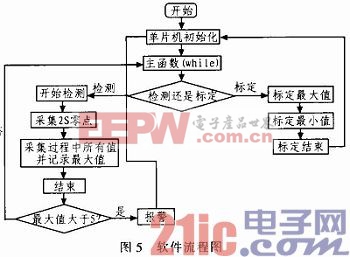
其中標定時有最大值標定和最小值標定。在標定最大值時,需要將滑動板向外移動1 cm,并由單片機記錄傳感器此時相應的電壓值。標定最小值時,需要將滑動板向內移動1 cm,并由單片機記錄傳感器相應的電壓值。有了這兩個值,并且知道滑動板左有各移動1 cm,即兩個電壓對應的滑動板距離差為2 cm。再根據傳感器由滑動板的移動而引起的電壓變化為線性的,我們就可以確定傳感器移動距離與電壓變化的關系。在之后的檢測中就可以通過電壓的變化值來確定滑動板移動的距離。
在檢測時,剛開始對傳感器的電壓進行采集200次,并進行平均,這個值作為本次檢測的零點電壓值。此后進行采集5次平均,目的是確保可采集更多的數據,將最大電壓值得出。采集過程中,得到的每一個電壓值都與零點電壓值進行比較,并將兩個電壓差值最大的點緩存下來。當點擊結束檢測的時候,緩存的電壓值與零點電壓值的差為此次測量得出的結果的反映。在經過電壓與滑動板位移的關系就可以得出本次測量過程中汽車在滑動板上走過后,滑動板的最大位移量。最后經過單位的轉化就得出了此次檢測的側滑量。側滑量通過數碼管進行顯示。如果側滑量大于5 m/km或小于-5 m/km,則汽車側滑不合格,單片機控制蜂鳴器報警。之后返回到選擇階段。
4 檢測結果
設計安裝完畢之后,首先對本系統進行標定,之后進行檢測測試。已知滑動板長為1 m,即滑動板每移動1 mm則最終側滑量為1 m/km。表1為檢測結果。
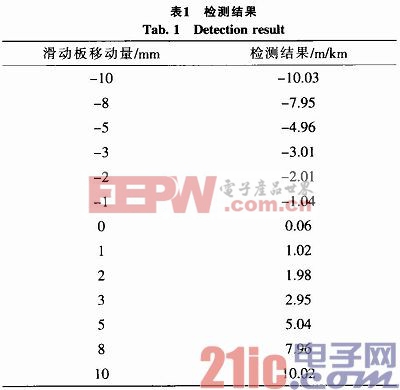
由表1可知,檢測結果的誤差均不超過0.1。國家對側滑檢測標準的誤差規定為不超過0.2。而且此數據為車間測試結果。車間的噪聲干擾較大,但檢測結果依然準確。所以此系統可以實用。
5 結束語
本側滑檢測系統運行穩定,可以準確的采集傳感器的電壓并得出測量過程中準確的側滑值。且本系統采用ATmega16,功耗低,效率高,集成度高,節約空間。在信號采集的過程中,使用了多次采集然后平均的方法,由于信號電壓一般是帶有毛刺的,所以多次采集后的平均有較大可能將電壓的毛刺去掉。此外本系統最好的地方是使用了很穩定的正負電源,使得給傳感器的信號電壓也很穩定。再加上之后對傳感器信號電壓的一些濾波處理,這樣給ATmega16進行處理的信號電壓就很穩定,所以得出的結果就很準確。由測試結果也可以知道,本設計可以在實際中進行應用。

評論