基于ATmega16的汽車側滑檢測裝置的設計

2.2 傳感器信號電壓抬升模塊
本側滑試驗臺使用的傳感器傳出的電壓值范圍是-2.5~2.5 V,而Atmega16的內置AD可采集的電壓為0~5 V,所以需要將這個電壓值抬升,這樣才可以采集到正確的電壓值。電壓的抬升電路如圖3所示。
在通過運放進行抬升電壓的時候,兩端的電壓是通過7805,7905產生的,因此,電壓都相對穩定,所以抬升以后的電壓也是比較穩定的,輸入和輸出電壓的關系為:

可以看出,調整后的電壓為原電壓的兩倍加上5 V,即:原電壓為-2.5~2.5 V,則調整后的電壓為0~10 V,且變化為線性關系。之后再通過電位計對電壓進行調整,使其符合0~5 V的標準,且是線性相關的,這樣就可以將抬升后的電壓直接接到AD轉換的端口上,通過AD轉換就可以讓AVR單片機得到現在位移的數據,從而達到檢測的目的。
2.3 數碼管顯示控制模塊
對數碼管進行控制,需要分別對數碼管的位選和段選進行控制,也就是說需要兩路信號來進行控制。同時,ATmega16的輸出的電壓為5 V,而數碼管的電壓應為1.8 V左右,所以在單片機的輸出和數碼管之間應接一個鎖存器,即可以實現降壓,又可以將一些信號進行鎖存,使得一些數值可長時間顯示。數碼管的控制方式如圖4所示,其中P1為片選的控制輸出,P2為位選的控制輸出。而且圖4同時給出了信號輸入
ATmege16和一些提示信號的輸出。本文引用地址:http://www.104case.com/article/196127.htm
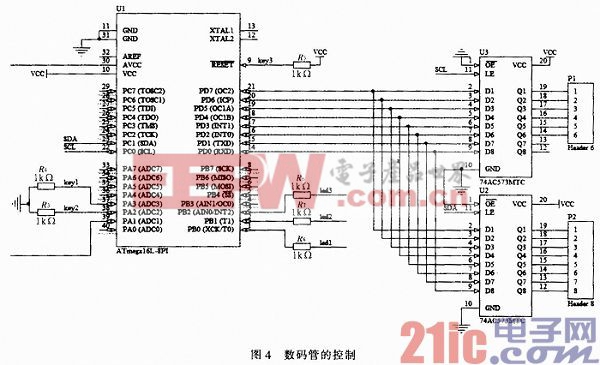
對數碼管的控制由單片機完成,顯示需要顯示的內容由單片機對每個數碼管的顯示進行循環刷新,這樣就可以讓數碼管顯示出的數據為連續的、可見的。達到對檢測結果顯示的目的。
2.4 整體模塊
單片機模塊是將相應的模塊連接在一起。然后需要一些LED燈的報警提示,LED燈的連接方法在圖4中也相應的給出。單片機和傳感器的連接為傳感器供電模塊提供傳感器的激勵信號,傳感器信號電壓抬升模塊接收傳感器的信號,并將其抬升至0~5 V,然后提供給ATmega16。

評論