基于面陣CCD的運動物體瞬時位置的檢測

因為要給出目標點的位置,所以每張圖像上的物體最終只能用1個點來表示,這個點就是物體的中心點,在圖形學上稱為圖形的幾何中心。確定物體的幾何中心,只需掃描整張圖像,尋找顏色是白色點,記錄它們的橫坐標和縱坐標,并做累加,同時累加白色點的個數,最后把累加得到的橫坐標的值除以白色點個數后,得到的值就是物體中心點的橫坐標數值,縱坐標也是如此。其算法表示如下:
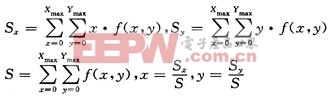
一般,這樣得到物體的幾何中心還是比較準確的,除非物體在運動過程中發生了非常大的形變。得到的質心是運動物體在圖像中的像素坐標,轉換成實際坐標從而達到對運動目標的實時監測。
4 軟件設計
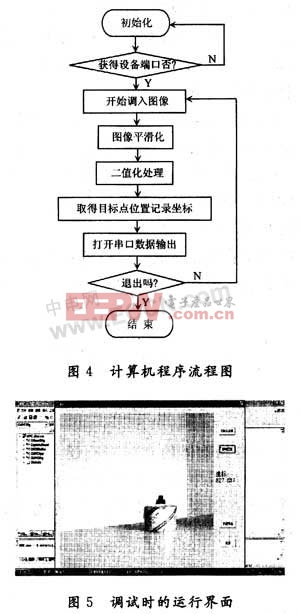
CCD采集獲得的圖像為8位位圖格式,本文采用可視化編程軟件VC++實現圖像預覽以及處理。處理后的數據經串口輸出給控制部分。計算機的程序流程圖如圖4所示。
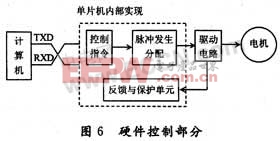
面陣CCD采集到的圖像經處理提取后,得如圖5所示其實時圖像,并提取跟蹤目標的坐標,圖像每過100 ms數據處理1次,并與下位機進行通信進行控制。
在串口通信模塊軟件實現中使用API函數結合非阻塞通信、多線程等手段;在主線程中處理圖像數據,在輔助線程中監視串口,有數據到達時依靠事件驅動,讀人數據并向主線程報告,并且WaitCommEvent(),ReadFile(),WriteFile()都使用了非阻塞通信技術,依靠重疊(overlapped)讀寫操作,讓串口讀寫操作在后臺運行。這樣做大大節省了時間,提高了系統的運行效率。
5 硬件設計
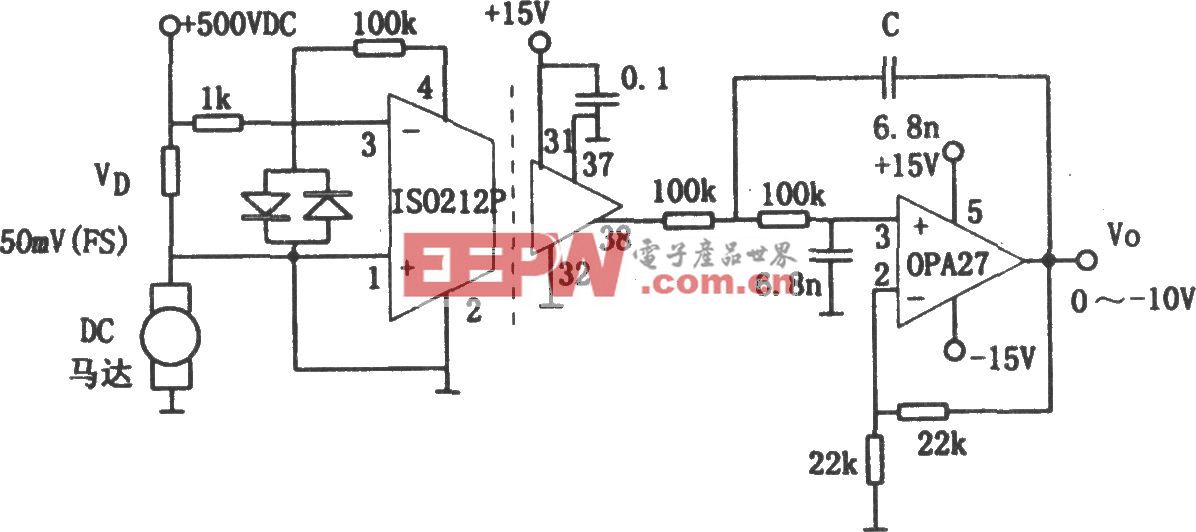
計算機通過RS 232的方式與單片機進行通信,將測得的位置信息傳送給單片機,單片機收到數據后控制步進電機進行跟蹤。其主要包括下位機與上位機的通信,以及步進電機的驅動電路的設計,硬件控制的框圖如圖6所示。
6 結語
本文通過面陣CCD對圖像采集,結合計算機數字圖像處理技術以及單片機,實現了對數據圖像的掃描處理,從而獲得了跟蹤點的目標位置及對掃描的圖像進行實時動態的顯示以及跟蹤。在軟件設計中使用了快速中值濾波和多線程技術使得在實際使用中能夠達到實時準確的目標,為提高非接觸位置測量方面的理論研究、測量技術及工程設計的水平將有很大的幫助。隨著CCD傳感器制作技術的提高,圖像處理軟件的進一步發展,CCD傳感器與集成電路進一步集成,面陣CCD傳感器的應用前景將更加廣闊,其應用的領域將深入到每一個相關的專業領域,將給人們帶來新的概念。




評論