基于CP-132UL V2的IMU地面測試軟件設計

針對IMU的野外測試環境限制,需改進其測試方法,則需用新的硬件采集電路實現。根據實際需要,在CP-132ULV2數據采集板的基礎上,采用VC6.0設計了針對野外測試環境所需的測試軟件,從而實現在惡劣環境下完成對IMU的標定工作。
2 CP-132UL V2簡介
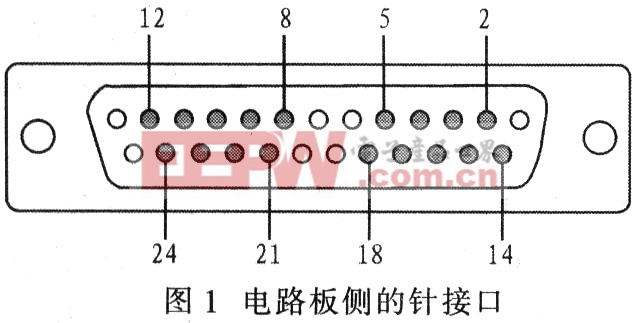
CP一132UL V2是Moxa公司生產的工業級多串口采集板,可信賴的信息傳輸最遠可達4 000英尺,最大波特率為92 160 b/s,使其傳輸RS一422/485的信息傳輸像RS一232一樣簡單。基于CP一132UL V2的自動數據傳輸控制的特點可為數據通道的開啟和關閉提供精確的時間控制,即使在高速數據傳輸下,也不會產生故障。將該器件置于電路板中的終端電阻器,為電阻器提供合適的阻值。絕緣保護方案可使電路板能夠承受2 000 V的高壓。下面給出CP-132UL V2的接口針分配圖,其中圖1是電路板和計算機的接口,25針結構,可以直接插入工控機的主板插槽,表1為其各針接口功能;圖2是與設備連接的接口,9針結構,連接需要測量的信號發生器,表2為其各針接口功能。

3 標定測試方法
IMU的核心部件是陀螺和加速度計,由于陀螺和加速度計自身的標度因數和安裝誤差因素的影響,使得IMU輸出存在較大誤差,所以需要標定IMU實現輸出補償。

采用分立標定方法標定慣組的誤差參數,所謂分立標定方法就是直接利用加速度計和陀螺的輸出作為觀測量,與已知基準信息相比較從而確定誤差參數。標定測試主要包括:①加速度計誤差參數的標定;②陀螺標度因數以及安裝誤差系數的標定;③陀螺常值漂移的標定;④標定結果評估。
4 標定軟件設計
基于CP-132UL V2的標定測試軟件主要包括RS-422串行通訊,靜漂測試和標定測試等功能模塊。
4.1 RS-422串行通訊
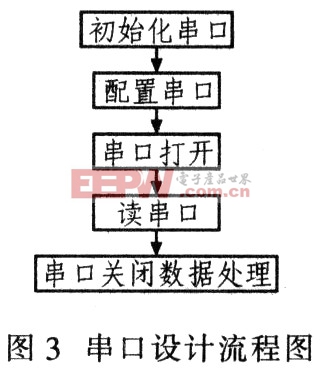
地面測試設備通過RS-422串行總線與慣組通訊,主要完成慣組數據接收和慣組誤差補償參數寫入,其波特率為921.6 Kb/s。而數據包括幀計數、3路陀螺數據及溫度3路加表數據及溫度,以及溫度控制板溫度。慣組的數據每隔10 ms發送一組數據。利用API函數實現對RS一422串口通信的訪問,在實現控制通信中,主要調用3個函數實現串口控制:首先配置串口,串口打開,然后通過對串口操作,接收數據后,關閉串口。程序設計流程如圖3所示。設計時,串口設計是針對CP-132UL V2采集板,由于采集板內部可自動分配地址,所以不需要對硬件做任何操作,只需在軟件上編寫串口功能即可實現串口通訊。
4.2 靜漂測試
靜漂測試主要是對慣組進行一次通電穩定性測試。測試數據采樣周期T、測試數據組數N可預先設定,最后計算靜漂測試數據平均值和隨機誤差,評估慣組穩定性。
設計時,需要注意的是采樣周期和測試組數可任意設定,所以要將采樣周期和測試組數設為全局變量,計算平均值和隨機誤差時,只需將前面采集的數值進行簡單算法。
4.3 標定測試






評論