可精確測距的低成本超聲子系統

處理超聲接收脈沖的接收器結構如圖4所示,可按照下列計算步驟確定元件值。

圖4 脈沖接收器結構
1 確定增益,保證接收傳感器在指定發送傳感器和接收器條件下能夠提供足夠的信號擺幅。本例中,采用1000倍增益。
2 利用兩極運算放大器提供1000倍的增益,采用反相放大器以獲得較好的共模性能:
① 偏置電壓由同相放大器設置。
② 建立偏置電壓允許接收傳感器交流耦合至放大器,同時提供高通濾波。放大器還具有可調節的輸入阻抗,以便從傳感器獲得最大功率(傳感器的數據手冊通常提供相應參數)。
第1級(OP1)增益設置為100,經過第1級放大之后的噪聲電平必須控制在可接受的范圍內。
3 利用MAX4329中的另一路運放構建第2級反相放大器,由于第1級放大器和第2級放大器之間具有相同的直流偏置電平,兩極之間不需要交流耦合。放大器配置為反相放大時會拾取高頻噪聲,因此第2級放大器可以配置成低通濾波器,從而使兩級放大器共同構成一個1階帶通濾波器。
4 第2級放大器輸出信號必須足夠大,送入施密特觸發器后轉換成40kHz的方波信號。也可以利用MAX4329的第3個運算放大器構建施密特觸發器,施密特觸發器的滯回電壓由下式計算。
滯回電壓=VccR7/(R7+R8)=160mV,Vcc=6V。
5 直流偏置電壓設置為Vcc/2,電池放電時可以跟蹤電池電壓,始終保持最大動態范圍,通過電阻分壓器得到該電壓。選擇電阻時需要注意,過小的電阻會導致靜態電流過大,很快將電池能量耗盡;電阻過大時,會引入較大噪聲。但熱噪聲可以通過陶瓷旁路電容C3濾出,連接在電阻分壓器之后的運算放大器OP4為偏置電壓提供一個低阻節點并滿足施密特觸發器的工作電流要求。
回波檢測與距離計算
一旦捕獲到回波信號,微控制器可以檢測脈沖信號并根據延時計算距離。檢測脈沖時,定時器B處于捕獲模式(見圖5)。

圖5 微控制器中的定時器B
將EXENB設置為1使能定時器的捕獲功能,超聲接收機的輸出應該送入定時器的TBB引腳,利用TBPS[2:0]位設置定時器的時鐘頻率。第一次IR中斷使能定時器,TBB引腳從1到0的跳變使定時器B的計數值(TBV)傳輸到捕獲寄存器(TBR)并置位EXFB標志。如果使能,EXFB標志置位還可以產生一次中斷。
TBR寄存器的數值包含了發射脈沖與接收脈沖之間所經歷的定時器時鐘數,根據時鐘周期即可計算出歷時時間。這個延遲時間內還包括了系統的延遲時間,計算發送與接收傳感器之間的距離時需要考慮這一因素。
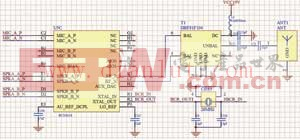
傳感器應用電路
系統中可以使用兩種類型的傳感器配置,具體選擇取決于物理架構。

圖6(a)使用獨立的TX和RX傳感器

圖6(b)單傳感器系統中
采用獨立的TX、RX傳感器時,微控制器的IR驅動器連接到一個外部放大器,用于驅動超聲TX。接收端,RX的超聲信號經過放大后轉換成數字信號(通過放大器和比較器實現),然后將該信號送到微控制器的16位定時器輸入端(見圖6a)。共用同一傳感器時,利用變壓器提高輸出信號的幅度(見圖6b)。



評論