基于CAN總線的三軸磁場(chǎng)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)

發(fā)電機(jī)組和電動(dòng)機(jī)組是電能生產(chǎn)和應(yīng)用的基本裝備,及時(shí)掌握大型電機(jī)的運(yùn)行狀態(tài),對(duì)電樞電壓、電樞電流、勵(lì)磁電流、溫度、轉(zhuǎn)數(shù)等參數(shù)進(jìn)行監(jiān)測(cè)就顯得尤為重要。電機(jī)狀態(tài)監(jiān)測(cè)系統(tǒng)所需要的傳感器種類繁多、數(shù)量大,構(gòu)成的傳感器網(wǎng)絡(luò)相對(duì)復(fù)雜。不同的狀態(tài)監(jiān)測(cè)機(jī)制存在著其總線結(jié)構(gòu)不統(tǒng)一、總線通信線路復(fù)雜、模擬信號(hào)干擾大等問(wèn)題,可靠性、實(shí)時(shí)性、經(jīng)濟(jì)性始終是設(shè)計(jì)者和用戶關(guān)注的主要方面[1]。
本文提出了基于控制器局部網(wǎng) CAN(Controller Area Network)總線數(shù)字模塊化三軸磁場(chǎng)監(jiān)測(cè)系統(tǒng)的概念,研究了大型電機(jī)狀態(tài)監(jiān)測(cè)系統(tǒng)架構(gòu)設(shè)計(jì),并重點(diǎn)設(shè)計(jì)與實(shí)現(xiàn)了傳感網(wǎng)絡(luò)節(jié)點(diǎn)模塊,以及 CAN總線上層協(xié)議的軟件設(shè)計(jì),提高數(shù)據(jù)采集與傳輸?shù)目煽啃浴?1 CAN總線應(yīng)用于電機(jī)狀態(tài)監(jiān)控的可行性分析
CAN總線由于采用了許多新技術(shù)和獨(dú)特的設(shè)計(jì),因此與一般的通信總線相比,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性的優(yōu)點(diǎn)。可以多主方式工作,從而使系統(tǒng)的各模塊實(shí)現(xiàn)多主通信,充分發(fā)揮各子模塊智能化功能。 CAN總線通信接口集中了 CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對(duì)通信數(shù)據(jù)的成幀處理,包括位填充、數(shù)據(jù)塊編碼、循環(huán)冗余校驗(yàn)、優(yōu)先級(jí)判別等工作。這樣就降低了開(kāi)發(fā)難度、縮短了開(kāi)發(fā)周期,這一點(diǎn)是僅有電氣協(xié)議的 RS-485無(wú)法比擬的。
1.1CAN總線的信號(hào)傳輸實(shí)時(shí)性分析
從 CAN的數(shù)據(jù)鏈路層協(xié)議,可以計(jì)算得出具有最高優(yōu)先級(jí)的數(shù)據(jù)幀的最壞傳輸時(shí)間。若在 1Mbit/s的傳輸速率下,最長(zhǎng)的擴(kuò)展幀格式的信息幀的傳輸時(shí)間為 130µs,在這種情況下,CAN信息幀的最長(zhǎng)阻塞時(shí)間為 130µs。通過(guò)標(biāo)準(zhǔn)幀格式首先降低了 CAN信息幀的阻塞時(shí)間,能夠滿足設(shè)計(jì)的實(shí)時(shí)性需要。另外考慮到整個(gè)監(jiān)測(cè)系統(tǒng)系統(tǒng)的節(jié)點(diǎn)數(shù)目,傳感器采集數(shù)據(jù)的周期通常為 10-3秒級(jí)以上,遠(yuǎn)大于 CAN總線的信息發(fā)送周期。因此 CAN總線的信息幀的傳輸時(shí)間完全可以滿足信號(hào)傳輸?shù)膶?shí)時(shí)性要求。
1.2CAN總線的信號(hào)傳輸可靠性分析
CAN總線是一種多主站的協(xié)議,不依賴某個(gè)節(jié)點(diǎn)的正常運(yùn)轉(zhuǎn)而存活。 CAN總線有一套有效地判別出錯(cuò)節(jié)點(diǎn)并無(wú)需改變軟件就能將其從總線網(wǎng)絡(luò)中剔除的機(jī)制[2],以此來(lái)保證整個(gè)網(wǎng)絡(luò)的穩(wěn)定性。CAN總線理論上探測(cè)不到的傳輸錯(cuò)誤比例僅有 1×10-13,這對(duì)于電機(jī)監(jiān)測(cè)設(shè)計(jì)的高可靠性要求是很有利的。考慮到 CAN總線是單總線設(shè)計(jì),為滿足電機(jī)監(jiān)測(cè)設(shè)計(jì)的可靠性要求,除恰當(dāng)選擇網(wǎng)絡(luò)的拓?fù)淠J酵猓€可以設(shè)計(jì)為雙總線冗余設(shè)計(jì)[3]。
另外,本設(shè)計(jì)通過(guò)單片機(jī)軟件上的防護(hù)措施和多種中斷復(fù)位措施,既有效降低功耗,又提高信號(hào)傳輸?shù)目煽啃浴?2監(jiān)測(cè)系統(tǒng)總體及節(jié)點(diǎn)模塊硬件設(shè)計(jì)
基于 CAN總線的模塊化電機(jī)磁場(chǎng)監(jiān)測(cè)系統(tǒng)數(shù)據(jù)采集與傳輸網(wǎng)絡(luò)結(jié)構(gòu)如圖 1。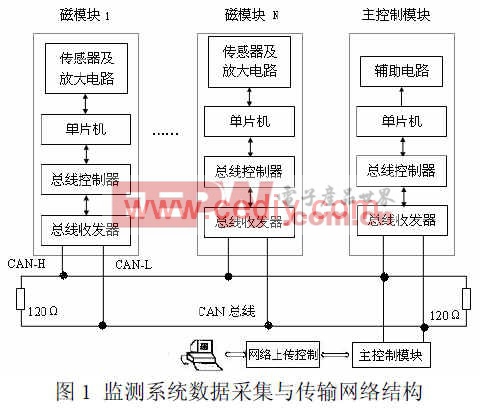
節(jié)點(diǎn)模塊化設(shè)計(jì)。每一路傳感器采用獨(dú)立的采集系統(tǒng)、信號(hào)處理系統(tǒng)、數(shù)據(jù)存儲(chǔ)系統(tǒng)和數(shù)據(jù)傳輸接口,整個(gè)節(jié)點(diǎn)電路模塊化,便于調(diào)試、安裝、置換,以及數(shù)字化和融合算法的軟件升級(jí)。
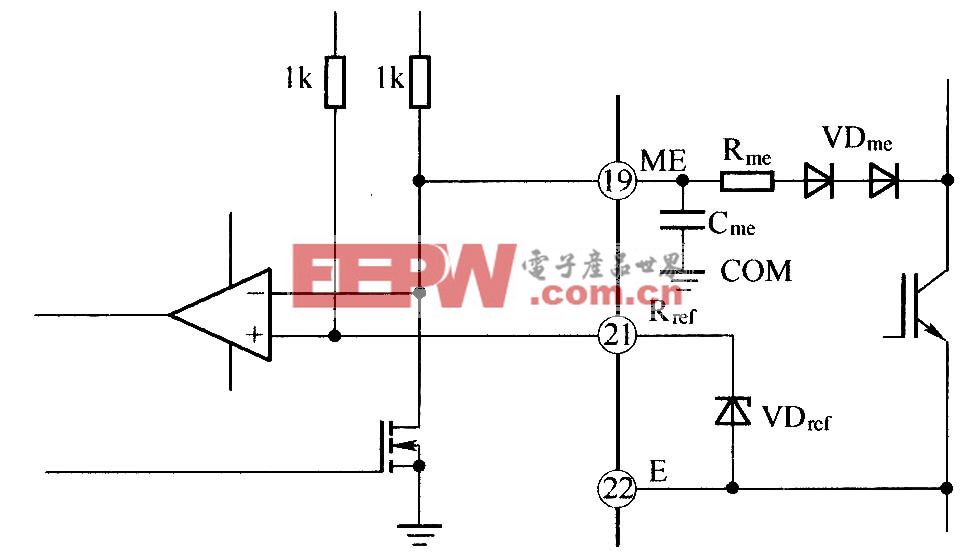
2.1網(wǎng)絡(luò)節(jié)點(diǎn)接口設(shè)計(jì)按照功耗分析對(duì)元器件從優(yōu)選擇,設(shè)計(jì)基于 CAN總線的模塊化實(shí)時(shí)磁場(chǎng)監(jiān)測(cè)系統(tǒng)節(jié)點(diǎn)的接口電路,如圖 2所示。
MCP2510作為一款獨(dú)立的 CAN控制器,是為簡(jiǎn)化連接 CAN總線的應(yīng)用而開(kāi)發(fā)的。 MCP2510主要完成三個(gè)部分功能:① CAN協(xié)議引擎;②用來(lái)為器件及其運(yùn)行進(jìn)行配置的控制邏輯和 SRAM寄存器;③SPI串口通信模塊。 CAN協(xié)議引擎的功能是處理所有總線上的報(bào)文發(fā)送和接收。
單片機(jī) MSP430F169作為控制核心( MCU),具備雙 SPI串口,通過(guò) SPI接口與器件進(jìn)行串口通信。使用標(biāo)準(zhǔn) SPI讀寫命令對(duì)寄存器所有讀寫操作。所提供的中斷引腳提高了系統(tǒng)的靈活性。器件上有一個(gè)多用途中斷引腳,以及各接收緩沖器專用的中斷引腳,可用于指示有效報(bào)文是否被接收和載入各接收緩沖器。也可用通用中斷引腳和狀態(tài)寄存器(通過(guò) SPI接口訪問(wèn))確定有效報(bào)文是否已被接收。
CAN驅(qū)動(dòng)器 TJA1040是一個(gè)物理層的器件,作為 CAN總線控制器和物理總線之間的接口,器件提供對(duì)總線的差動(dòng)發(fā)送能力和對(duì) CAN總線控制器的差動(dòng)接收能力。








評(píng)論