使用高級函數模塊API進行運動輪廓開發

由于函數模塊執行是在掃描引擎周期內的,因此可能在響應外部事件時或是同步不同軸類型時等,會有較小的延遲。表1定義了最小延遲與最大延遲。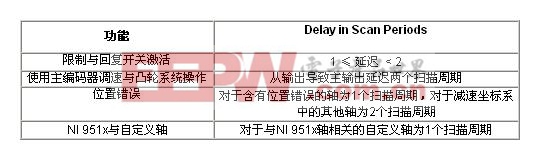
使用NI SoftMotion函數模塊
LabVIEW NI SoftMotion模塊提供了函數模塊,用于構建使用函數模塊編程模型的確定性運動控制應用程序。
LabVIEW具有基于IEC 61131-3工業控制系統編程國際標準的函數模塊。這些函數模塊為實時應用而設計,能夠將其參數作為共享變量,用于人機界面(HMI)編程和狀態監視中。您可以利用這些熟悉的工業函數模塊和LabVIEW中的所有VI與函數,開發簡單和復雜的工業測量與控制應用程序。
在Windows平臺下安裝了LabVIEW和LabVIEW實時模塊后,您可以使用LabVIEW函數模塊,它們與LabVIEW實時模塊一起進行安裝。LabVIEW NI SoftMotion安裝附加的函數模塊,提供運動控制函數,并且讓您使用LabVIEW項目來配置并測試您的運動軸設置,調節伺服電機。LabVIEW NI SoftMotion包含在LabVIEW的平臺DVD中。您可以安裝模塊的30天試用版或使用限制功能的免費版模塊。
函數模塊使用LabVIEW編寫,設計用于非阻塞確定性執行的實時應用中,使得它們適用于對時間確定性要求非常嚴格的代碼中。函數模塊的每個實例都有唯一的名稱和可重入執行的內存空間。因此,您可以在應用程序中獨立使用這些函數模塊。舉例而言,您可以使用PID函數模塊的每個實例控制一個獨立的系統。
在應用中使用的函數模塊在LabVIEW項目中可見,并且能夠遠程訪問每個終端中的共享變量。您可以在函數模塊的屬性頁面中配置這些終端和變量。
在默認設置下,終端變量被配置為單線程實時FIFO的共享變量,因此您可以在實時應用中使用,從而避免訪問變量值時的抖動。您可以配置每個終端,從程序框圖的終端中接收數值,或是從對應的共享變量或是常量中遠程接收數值。
您可以將終端變量配置為網絡發布共享變量,為HMI編程和遠程監視提供遠程參數數值訪問。對于HMI編程,您可以在臺式機或工業觸摸屏計算機的LabVIEW應用程序中使用共享變量。NI分布式系統管理器可以用于監視在網絡上的系統和管理發布數據。對于系統管理員,您無需LabVIEW開發環境就可以查看函數模塊參數數值。通過配置函數模塊終端接收變量數值,您還可以通過系統管理器寫入參數數值,舉例而言,您可以遠程調節PID函數模塊。
NI SoftMotion函數模塊還包含其他用于監視和維護每個函數模塊狀態的附加參數。用于NI SoftMotion函數模塊的API是非阻塞、異步的API,您可以用來與您的運動控制硬件進行通信。

伺服電機相關文章:伺服電機工作原理



評論