光電軸角編碼器的細(xì)分誤差快速測量系統(tǒng)

1.4 軟件控制流程
要分析編碼器在工作時的細(xì)分誤差,數(shù)據(jù)采集速率要在100 ksps以上。本系統(tǒng)采用2片A/D轉(zhuǎn)換芯片,分時采集編碼器的4路信號,當(dāng)讀其中一片芯片的數(shù)據(jù)時,啟動另一芯片開始轉(zhuǎn)換。采用本方法4通道的最高采樣速率可達(dá)120 ksps以上,2通道的最高采樣速率可達(dá)240 ksps以上。
采集到的數(shù)據(jù)需要經(jīng)過傅立葉變換,計算出編碼器的細(xì)分誤差。當(dāng)數(shù)據(jù)量太大時,會給后續(xù)的數(shù)據(jù)處理帶來很多麻煩;數(shù)據(jù)量太少時,又不能反映信號的真實情況。實驗證明:編碼器每個精碼周期的最佳采樣點數(shù)應(yīng)在60~100點之間。在本系統(tǒng)中采樣點設(shè)定為85點,根據(jù)編碼器加速度的變化,采樣點會在附近波動。DSP在接收到采樣命令后,對編碼器信號進(jìn)行采樣,首先,判斷編碼器的轉(zhuǎn)速,設(shè)定采樣頻率,保證一個周期的采樣點數(shù)在85點左右,連續(xù)采樣3個以上完整的周期,采樣完成后將數(shù)據(jù)一并傳給計算機(jī)處理。
2數(shù)據(jù)處理
編碼器輸出的是角度信息,其輸出信號是以角度為自變量的空間函數(shù)。如果數(shù)據(jù)采集卡的采樣頻率是固定的,并且,編碼器是勻速轉(zhuǎn)動,理論上可以得到等轉(zhuǎn)角的角度信息。在編碼器實驗或工作時,數(shù)據(jù)采集卡的采樣頻率可以控制成固定采樣頻率,但編碼器不可能是嚴(yán)格意義上的勻速運(yùn)動,可以認(rèn)為是加速度很小的等加速運(yùn)動,所以,采集到的精碼光電信號是非等轉(zhuǎn)角的。在編碼器工作時,采集2路相位差為π/2的正弦精碼光電信號usin和ucos,首先,計算編碼器的加速度,再利用線性插值法進(jìn)行等轉(zhuǎn)角處理,得到一組新的數(shù)據(jù)u′sin和u′cos,由u′sin和u′cos組成的精碼光電信號就是一組等轉(zhuǎn)角的光電信號。
編碼器2路相位差為π/2的正弦精碼光電信號ua和ub,精碼光電信號通常含有直流電平、基波及高次諧波。高次諧波以二次和三次諧波為主要分量,故可其波形方程為

編碼器精碼光電信號具有周期函數(shù)的性質(zhì),任何一個周期函數(shù),都可以展開為如下的傅立葉級數(shù)
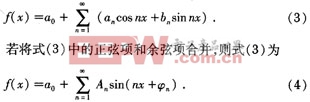
式(4)表明:一個周期函數(shù)可以由常數(shù)項a0與各次諧波之和組成。其中,An為f(x)的各次諧波的振幅;φn為相應(yīng)的各次諧波的初相角。這樣,對實測數(shù)據(jù)信號進(jìn)行諧波分析,可以求出a0,An和φn。





評論