基于nRF4O1的呼吸暫停無線監測系統

2.4.1對于DSl8B20的軟件設計
雖然數字傳感器的硬件接法比較簡單,但在測量溫度時有嚴格的時序要求。一旦時序出現錯誤,那么溫度的讀取和顯示就不能正確進行,在編寫程序時這個問題需要著重考慮,例如我們采用中斷時,就要考慮中斷的執行對于單片機工作整個時序的影響。DSl8B20的一線工作協議流程是:初始化→ROM操作指令→存儲器操作指令→數據傳輸。其工作時序包括初始化時序、寫時序和讀時序。寄存器R1、R0決定溫度轉換的精度位數:R1RO=“00”,9位精度,最大轉換時間為93.75ms;RlR0=“01”,10位精度,最大轉換時間為187.5ms;R1R0=“10”,11位精度,最大轉換時間為375ms;R1R0=“1l”,12位精度,最大轉換時間為750ms;未編程時默認為12位精度。我們采用器件默認的12位轉化。
2.4.2 對于nRF401的編程
由于直接采用的點對點的收發,所以直接利用單片機將收發芯片設置為“收”或“發”模式。對于Standby與RX之間的切換,從待機模式到接收模式,當PWR_UP輸入設成1時,經過近3ms時間后,DOUT腳輸出數據才有效。從待機模式到發射模式,所需穩定的最大時間是也為3ms。Power Up與TX間的切換,從加電到發射模式過程中,為了避免開機時產生干擾和輻射,在上電過程中TXEN的輸入腳必須保持為低,以便于頻率合成器進入穩定工作狀態。當由上電進入發射模式時,TXEN必須保持1ms以后才可以往DIN發送數據。在接收部分,同樣利用單片機的P1口各管腳分別控制NRF401的DIN、DOUT、TXEN、PWRUP、CS這五個腳即可。
2.4.3 對于呼吸信號處理的編程
將接收到的呼吸信號接入接收部分單片機中,對溫度值進行處理。我們知道,被傳感器采集到的人體溫度大約33℃,但如果利用溫度的高低值來作為是否出現呼吸暫停的依據,這種方法會受周圍溫度的影響,若溫度過高,該系統就會出現誤判的情況。所以我們利用的是提取溫度的變化量,盡管周圍溫度有影響,但由于人體呼吸而導致的呼吸變化總能準確地判斷出來。經過調試,這種思想很好地解決了因周圍溫度變化所帶來的干擾。
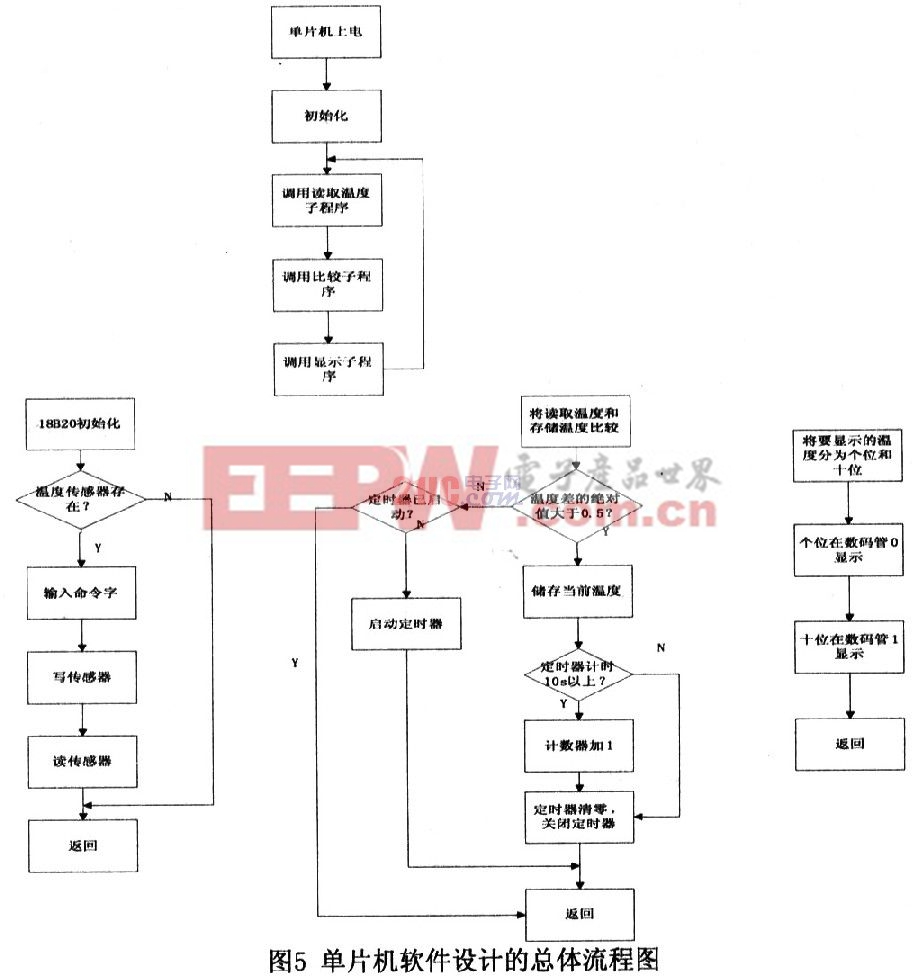
2.4.4 對于顯示電路的程序
當溫度在10s或lOs以上還沒出現變化時,將計數器加一,如果存在呼吸暫停,但沒有達到10s,則定時器清零,重新返回程序。
3 結束語
本文主要介紹了一個可以進行呼吸暫停無線監測的系統,提出了一種新型的提取呼吸信號的方法,此系統不僅可以實現呼吸暫停的遠距離監測,在監測上還具有很高的穩定性和準確性。我們利用此呼吸暫停監測系統進行實際的檢測,取被測個體12人,其有效率和準確率達到90%,只有在附近環境電磁場強烈干擾時時才會造成


評論