基于MEMS組合模塊的姿態(tài)檢測(cè)系統(tǒng)設(shè)計(jì)

2 仿真驗(yàn)證
應(yīng)用文中構(gòu)造的數(shù)據(jù)融合模型,通過Matlab工具對(duì)實(shí)測(cè)原始數(shù)據(jù)進(jìn)行仿真,驗(yàn)證此模型的有效性。加速度計(jì)原始信號(hào)如圖5所示。本文引用地址:http://www.104case.com/article/194995.htm
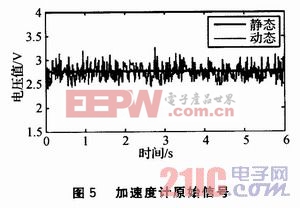
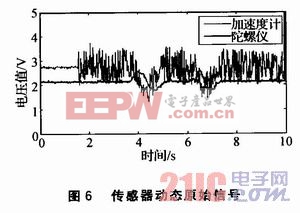
這是加速度計(jì)在動(dòng)態(tài)和靜態(tài)時(shí)的原始信號(hào)輸出對(duì)比,可見加速度計(jì)的動(dòng)態(tài)輸出由于存在高頻干擾,致使輸出數(shù)據(jù)完全不能準(zhǔn)確地反映真實(shí)的姿態(tài)值。被測(cè)平臺(tái)發(fā)生傾斜時(shí)采集的加速度計(jì)和陀螺儀的原始信號(hào)值如圖6所示。可以看出,在1.6 s之前被測(cè)平臺(tái)沒有受到震動(dòng)干擾,此時(shí)加速度計(jì)的輸出信號(hào)振幅較小。在1.6 s之后,被測(cè)平臺(tái)受到震動(dòng)干擾,加速度計(jì)的輸出信號(hào)受到嚴(yán)重干擾,而陀螺儀的輸出信號(hào)幾乎不受震動(dòng)干擾。
數(shù)據(jù)融合結(jié)果如圖7所示。其中,加速度計(jì)曲線是通過對(duì)加速度計(jì)原始信號(hào)計(jì)算得到的角度值,可見依然波動(dòng)較大。陀螺儀曲線是通過對(duì)陀螺儀的輸出角速度值進(jìn)行積分運(yùn)算所得的角度值。數(shù)據(jù)融合曲線是通過文中構(gòu)造的數(shù)據(jù)融合模型進(jìn)行解算得到的角度值。
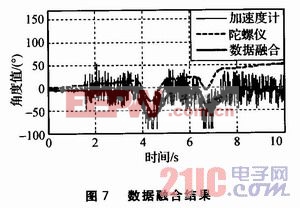
由圖7可以看出,由單一的加速度計(jì)得出的角度值波動(dòng)很大,不能準(zhǔn)確反映真實(shí)值。由單一的陀螺儀經(jīng)過積分運(yùn)算得到的角度值雖然沒有波動(dòng),但隨著時(shí)間的增大,產(chǎn)生的積分累積效應(yīng)將非常嚴(yán)重。從0 s到10 s,陀螺儀產(chǎn)生的積分累積偏差接近了50°,并以平均5°/s的速度加速擴(kuò)大。這也是不能單獨(dú)使用陀螺儀進(jìn)行平臺(tái)姿態(tài)檢測(cè)的原因。而經(jīng)過數(shù)據(jù)融合處理后得到的角度值,既克服了加速度計(jì)動(dòng)態(tài)性能差的缺點(diǎn),又很好地補(bǔ)償了陀螺儀的積分飄移。
3 系統(tǒng)實(shí)現(xiàn)
3.1 硬件設(shè)計(jì)
在電路板設(shè)計(jì)之初,需要根據(jù)加速度計(jì)、陀螺儀的敏感軸方向確定傳感器的安裝位置和角度。陀螺儀和加速度計(jì)應(yīng)安裝在較近的位置,盡量減少兩傳感器的外部環(huán)境差異,這有利于減少后期數(shù)據(jù)處理的誤差。在平臺(tái)剛性接觸面是否采取防震處理,如加入防震墊片等措施,這對(duì)于傳感器的輸出有很大影響,尤其是對(duì)加速度計(jì)的影響尤為突出。










評(píng)論