三維旋轉激光掃描測量系統的設計

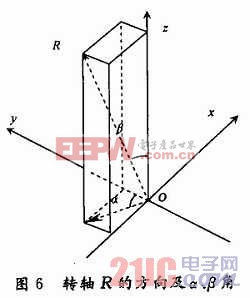
有了轉臺中心軸線的方向,還需要確定空間三點P1,P2,P3繞轉軸R形成圓的圓心O(x0,y0,z0)才能使轉臺中心軸線定位。如圖6,為了求O,首先計算轉軸R在xOy面上的投影與y軸夾角α、R與z軸的夾角β,然后P1,P2,P3依次繞z軸、x軸旋轉到與xOy平行的平面上,旋轉矩陣分別為:

式中:P1,P2,P3旋轉到與xOy平行的平面上就可以很容易求出圓心,然后將圓心再依次繞x軸、z軸反向旋轉β和α,即得到O,轉臺中心軸線的方向和位置得到確定。本文引用地址:http://www.104case.com/article/194944.htm
5 多視拼合及重疊數據區域的處理
逆向工程中,對實物樣件進行數字化時,因為測量范圍的限制或遮擋的關系,往往不能在同一坐標系下一次測量產品全部的幾何數據,需要在不同的方位(即不同的坐標系)測量產品的各個部分,其中每個方位測量的數據片稱為視,多個方位測量的數據稱為多視數據,將不同坐標系下的多視數據統一到同一坐標系下的處理過程,稱為多視數據拼合。
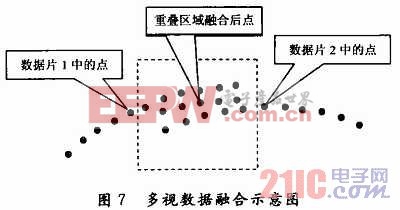
多視數據拼合包括兩個部分,第一步是將不同坐標系的數據變換到同一個坐標系中,數據片通過旋轉和平移來調整方位達到形位匹配;多視數據變換到同一坐標系后,數據片之間存在重疊區域,由于測量和變換存在誤差,重疊區域內的多重數據需要做合理的運算使其融合為單層數據。第一步是方位調整,可稱為“拼”(Registration),亦稱數據對齊,第二步是多層數據融合為單層數據,可稱為“合”(Intergr-ati-on)。將數據點集看作一個剛體,兩個數據點集的對齊屬于空間剛體移動,因此多視數據對齊問題可看作空間兩個剛體的坐標轉換,問題歸結為求解相應的轉換矩陣,移動矩陣T和旋轉矩陣R。如圖7所示是2個數據片截面上兩行數據融合的示意圖。最簡單的融合方法是中值平均,這樣會在重疊區域邊緣出現臺階。改進的方法是加權,使得融合后的數據片在重疊區域邊緣光滑過渡,但這種方法未考慮重疊區域邊緣外一定鄰域內的數據點也存在誤差。
6 結語
通過激光旋轉掃描測量的方式獲取樣件的三維信息,可方便快捷地進行雕刻制品的加工,快速實現雕刻藝術品的數字化以及復制或批量生產。從而節省硬件平臺及人力成本,在木雕、石雕、玉雕等各類雕刻行業中獲得極其廣泛的應用,掀起了一場革新的浪潮。


評論