基于改進神經網絡的非線性系統觀測器設計

近年來,鑒于神經網絡的特性和發展潛力,神經網絡成為研究的熱點之一。伴隨著控制對象復雜性的提高,系統存在的不確定因素和難以確切描述的非線性特性也隨之增多,神經網絡的研究和發展顯得尤為重要。與傳統控制系統狀態觀測器相比,神經網絡狀態觀測器具有更強的逼近非線性函數的能力和容錯性,尤其適用于多輸入多輸出系統。
與線性定常系統中的設計[2]相比,本文是在非線性系統中利用前饋神經網絡的函數逼近能力,設計出了一種神經網絡觀測器,并對觀測器的穩定性進行了分析。本文采用了LM優化算法來改進BP網絡,由于其算法可以比標準梯度下降法網絡訓練速度提高幾十甚至上百倍[3],從而大大提高了工作效率。仿真結果說明了設計的合理性和有效性。
1 觀測器設計原理
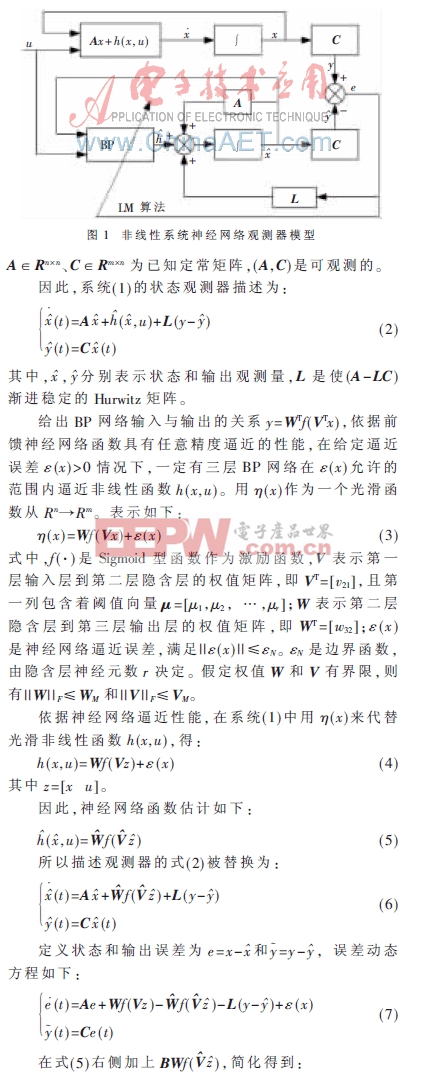
神經網絡觀測器的原理與傳統狀態觀測器相似,都是利用重構的思想。神經網絡的主要作用是來逼近系統中的非線性函數。首先將輸入量u、狀態變量x作為BP神經網絡的輸入,對神經網絡進行訓練,使其逼近非線性函數h(x,u);然后將訓練好的網絡用于構成觀測器,并通過神經網絡觀測器的輸出y與原來系統的輸出y的差值來確定調整BP網絡的權值,使其獲得想要的狀態估計變量x。系統只有y可以直接測量。
設計一個神經網絡觀測器關鍵是找一個神經網絡去識別非線性,并且利用傳統的觀測器思想去重構狀態。因此,神經網絡觀測器模型如圖1所示。
2 神經網絡非線性系統觀測器的建立
給定如下的非線性系統:






評論