基于超聲波的圍巖松動圈實時監測系統設計

2.1 主控單元與存儲模塊
本系統采用的主控芯片為ST公司推出的基于ARMCortex-M3內核的32位微控制器STM32F103。該控制器是為低功耗和價格敏感的應用而專門設計的,具有突出的能效比和處理速度。本設計中嵌入了μC/OS-II操作系統,可以便于多任務控制。此外,STM32微控制器支持NAND Flash存儲器擴展,能夠將采集的數據存到Flash里面,存儲與提取數據更加快速。
2.2 超聲波發射與接收電路
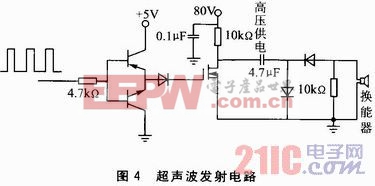
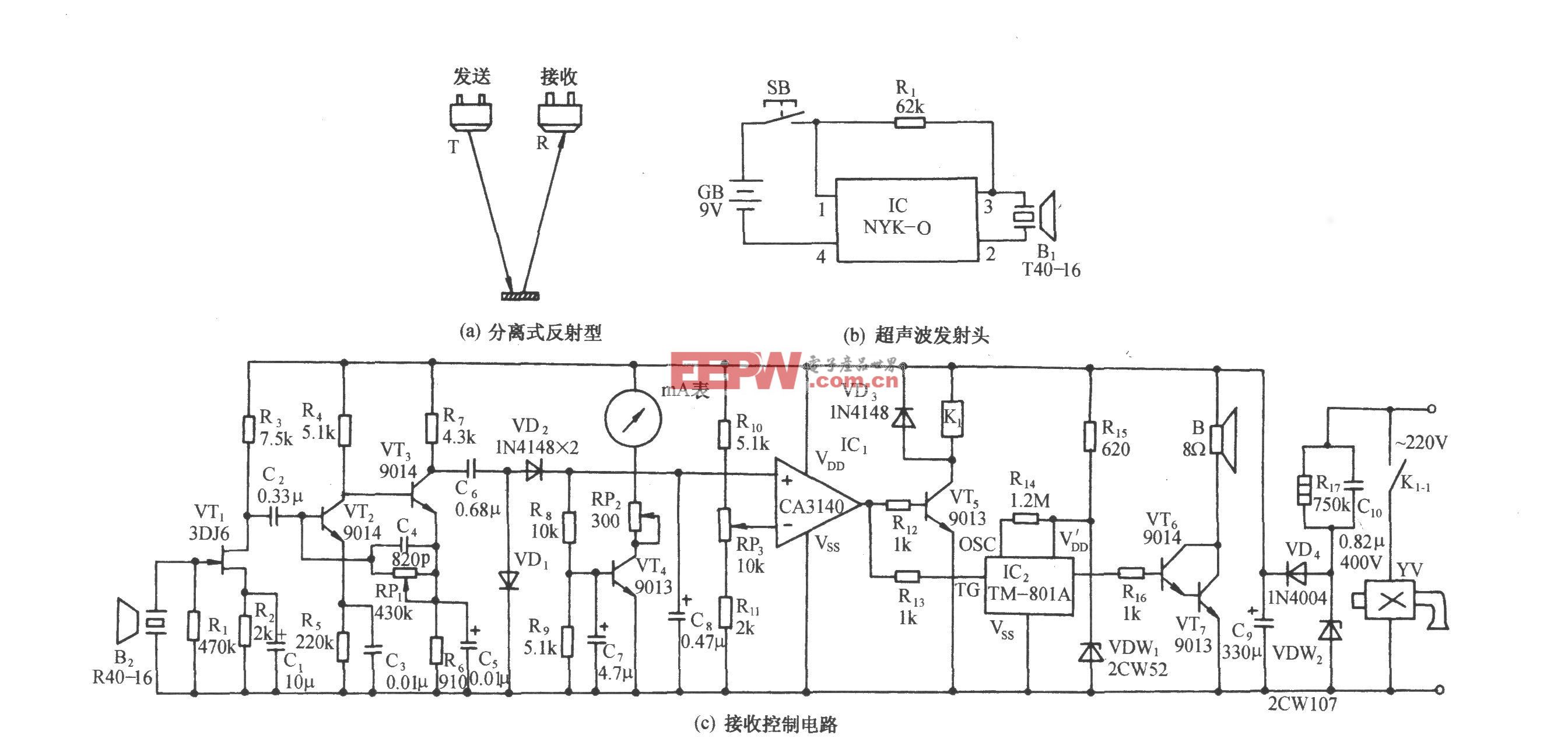
2.2.1 超聲波發射電路
超聲波發射電路由超聲波產生電路、放大電路以及超聲波換能器組成,如圖4所示。由STM32F103的PWM模塊產生40kHz的矩形波,經放大電路放大送入超聲波發送換能器,發送出40 kHz的超聲波。
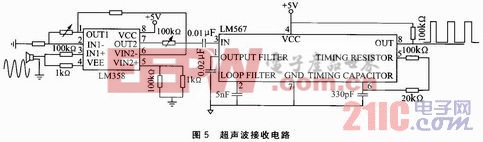
2.2.2 超聲波接收電路
超聲波接收電路包括放大信號電路、帶通濾波電路以及整剝型發電路,如圖5所示。超聲波探頭接收超聲波,經過LM358對其兩級放大,然后將放大的信號送入LM567將波形濾波并且觸發CPU的引腳。LM567具有帶通濾波和觸發的作用,5、6腳外接的電阻和電容決定了內部壓控振蕩器的中心頻率f,f≈1/1.1RC。當LM567的3引腳輸入幅度大于等于25 mV,并且頻率在帶寬內的信號時,8引腳由高電平變為低電平,觸發CPU的引腳,完成接收超聲波的功能。
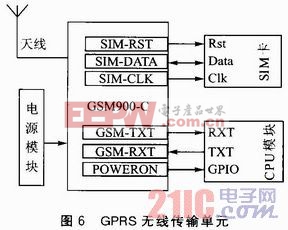
2.3 GPRS模塊
GPRS無線傳輸模塊采用華為公司的GSM900-C模組,如圖6所示。GSM通過串口接收CPU的數據,并實時地發送給后方監控室,通過發送引腳將后方監控室的命令傳送給CPU,從而實現了后方監控室可以主控請求目標板之間人機互動的功能。目標板也可以自動定時采集數據,并通過GSM模塊傳輸到后方監控室。
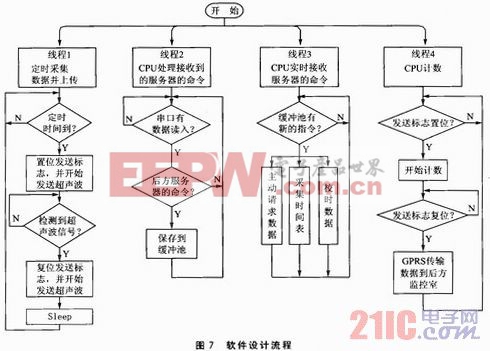
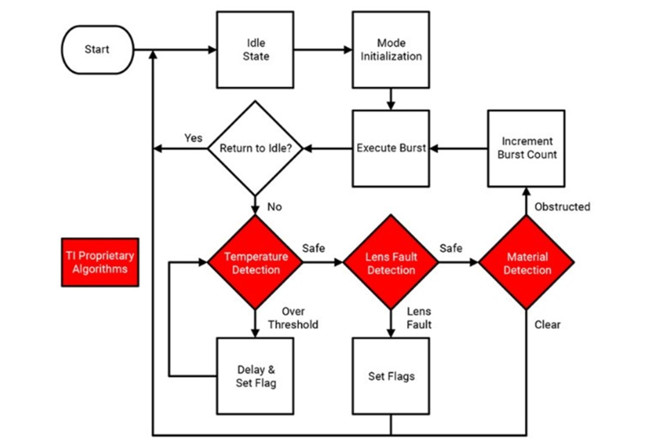
3 圍巖松動圈監測系統軟件設計
基于超聲波的圍巖松動圈監測系統的軟件設計流程如圖7所示。本設計中嵌入了μC/OS-II操作系統,主要包括4個線程:











評論