海洋維權執法浮標信息采集系統的CAN總線設計

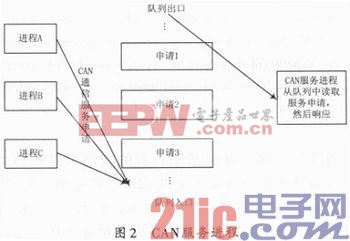
(2)軟件的設計。主機和通訊機通過CAN總線相連,作為整個浮標信息采集系統通信的通道。STM32F207內置CAN 2.0接口,支持CAN 2.0B協議,該協議符合國際標準。浮標系統的CAN通信幀采用的是擴展幀格式。考慮系統的通信過程都是突發式的,除了通道標定。不論主機還是通訊機,在將通道標定作為一個獨立的模式后,CAN相關功能都設計做服務性的獨立進程,CAN通信的服務請求都匯聚到一個消息隊列中,都是以消息的形式,最后通過一個統一的進程接收處理。在這種工作機制下,一般情況下,通訊機通過CAN總線發送給主機的第一幀數據,不能被主機可靠地接收。因此,每次通信開始先要建立可靠的通信鏈路使主機做好準備。建立連接后,通訊機就可以發送命令,要求主機上傳數據。通訊機發送完命令后,再發送刪除連接幀,這樣就完成了一次完整的通信。CAN服務進程如圖2所示。本文引用地址:http://www.104case.com/article/192747.htm
3 結論
在此完成了CAN功能進程的設計與實現。系統安裝了水文氣象傳感器及浮標體安全監控傳感器等。基于海洋浮標低功耗及安全性的要求,系統由值守節點負責控制啟動。
4 結語
本文創新地將CAN總線技術應用于海洋維權執法浮標信息采集系統中。通過CAN總線將主板和通訊板相連,并對軟件和硬件進行了設計及測試。實驗證明這種對數據的實時采集與傳送系統,提高了系統的可靠性,也具有實時性強、糾錯能力強等特點,該系統的研制成功具有較高的實際應用意義。











評論