基于C8051F060的超聲波導盲系統設計

2 硬件設計
2.1 超聲波發送部分
大多數的超聲波產生電路的設計都會采用硬件集成振蕩電路實現,設計較為繁瑣,精度不高,而該設計的超聲波的產生由軟件編程的方法實現。
C8051F060 MCU內有一個片內可編程計數器/定時器陣列PCA。PCA包括一個專用的16位計數器/定時器和6個可編程的捕捉/比較模塊。每個捕捉/比較模塊都有其自己的I/O線(CEXn)。當被允許時,I/O線通過交叉開關連到端口I/O,該設計就是利用了其中的四個捕捉、比較模塊(CEX0~CEX3),通過交叉開關連接到端口P0.O~P0.3,因此可以獨立的在P0.O~P0.3端口上產生40 kHz的方波信號。時間基準可以是下面的6個時鐘源之一:系統時鐘/12,系統時鐘/4,定時器O溢出,外部時鐘輸入ECI,系統時鐘和外部振蕩源頻率/8。實驗證明應用外部振蕩時鐘源8分頻作為時間基準較其他方法得到的方波信號更為精確、穩定。每個捕捉/比較模塊可以被編程為獨立工作在下面的6種工作方式之一:邊沿觸發捕捉、軟件定時器、高速輸出、頻率輸出、8位PWM或16位PWM,在此采用的是頻率輸出方式。
40 kHz方波信號由單片機產生后,經通用I/O口輸出到換能器放大,再由超聲波傳感器的探頭發出,四個探頭的工作是輪流進行的。每一個探頭工作時都是先發出16個周期的超聲波脈沖信號,用時O.4 ms,然后消余震2 ms,此時開始接收回波信號,過15.6 ms后停止接收信號,再經過O.5 ms的信號處理時間后第一個探頭的工作結束,轉為下一個超聲波傳感器進行相同的工作。也就是系統僅接收信號發出后2~17.6 ms之間的回波信號,又因為超聲波在空氣中的傳播速度約為340 m/s,也就是系統能識別的障礙物的距離范圍在34 cm~3 m。
2.2 信號接收部分
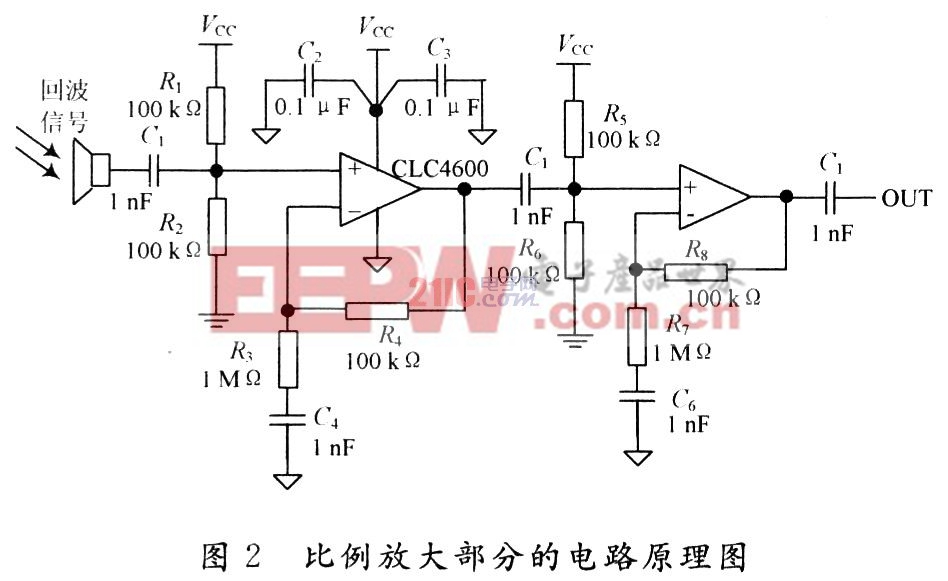
信號發送出去以后若遇障礙物就會反射回來,即為回波。回波信號信號一般較弱,僅為幾毫伏,該系統先將接收到的回波進行比例放大,使回波信號增大到幾百毫伏。比例放大部分采用的芯片是CADEKAMicrocircuits的CLC4600運算放大器,CLC4600運算放大器據具有四信道,每通道供電電流消耗僅3.3 mA,具有300MHz的單位增益帶寬。比例放大部分的電路原理圖如圖2所示。
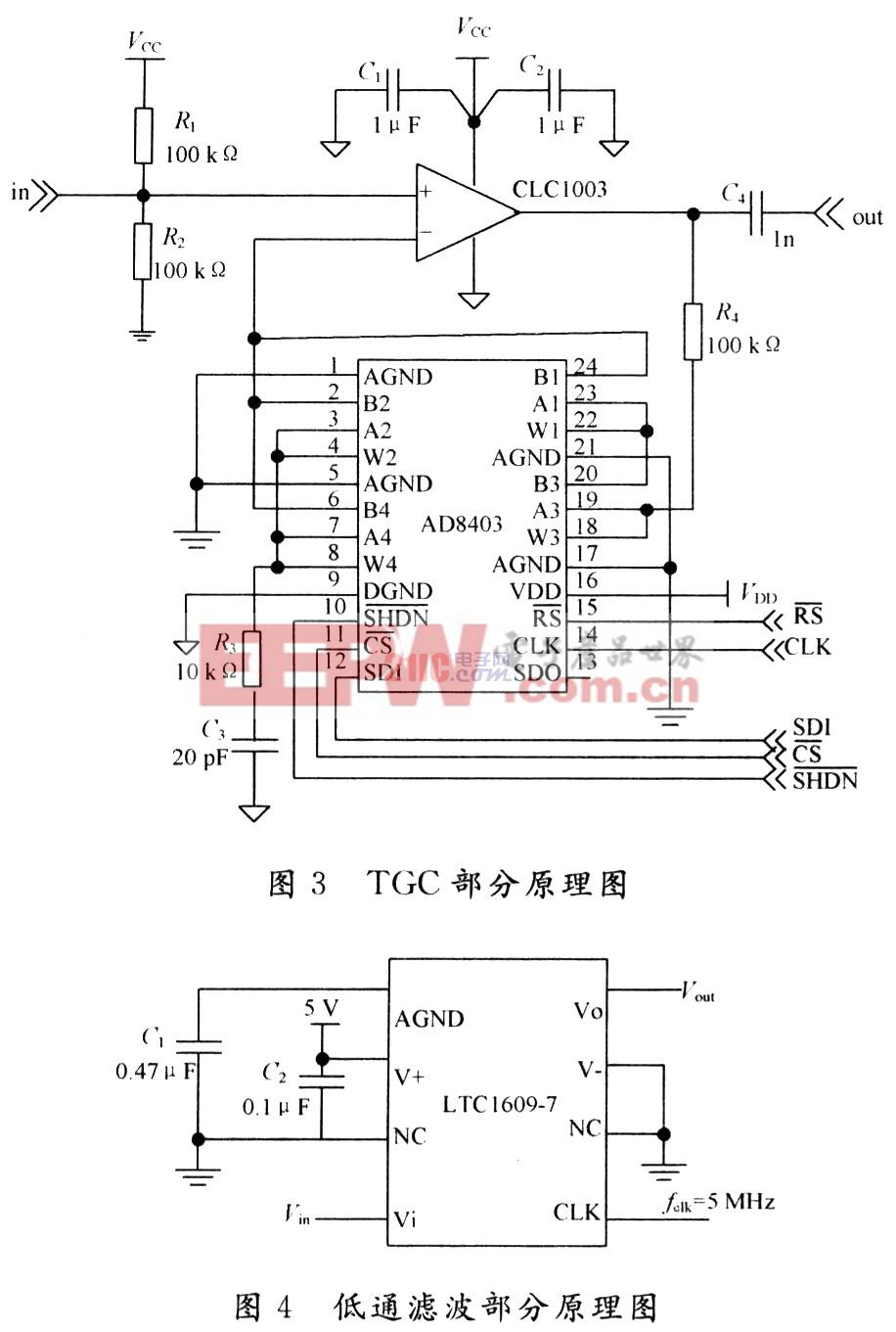
由于障礙物的遠近不同以及超聲在空氣中的衰減程度,得到的回波信號幅度會有所變化:越早接收到的回波信號越強,越晚越弱。針對不同時刻接收到的回波的強度不同,需要對信號進行不同倍數的放大,使放大后的信號都有相同的幅值,因此需要一個增益隨時間變化可調的放大電路,這樣的放大電路即為時間增益控制(TGC)電路。
該設計中TGC部分主要是由運算放大器與數字電位器相互配合共同實現的。運算放大器采用的是CADEKA Microcircuits的單路,低失調,軌到軌輸入/輸出放大器CLC1003。數字電位器選用美國ADI公司生產的AD8403A10,是一種具有數字接口的有源器件。可方便地與單片機相連接,用來精確調整其阻值。他可以代替電路中的機械電位器,從而實現操作上的智能化。采用固定數字電位器來控制放大電路的增益,可以用簡單的線路,實現量程多極變化,并且具有很高的增益分辨率。AD8403A10是四通道的數字電位器,每通道的電阻的標稱值為10 kΩ,有256個分支點,最小的電阻調整精度可達39Ω,采用兩通道并聯可將精度降至20Ω以內,每通道的不同分支點的處的電阻值都有相應的串行數據與之對應。將AD8403的兩通道串聯用來調節增益,另兩通道串聯用來調節偏執電壓,當回波信號接收后,單片機通過向AD8403不斷送入串行數據來調節不同時刻的增益,最終使得到的回波信號幅度在一定的范圍之內。本單元的硬件原理圖如圖3所示。










評論