基于Zigbee無(wú)線傳感器網(wǎng)絡(luò)定位問(wèn)題的研究

1引言
本文引用地址:http://www.104case.com/article/188870.htmZigbee技術(shù)已日益受到重視。這種以低成本、低功耗、低數(shù)據(jù)傳輸速率、低復(fù)雜度為顯著優(yōu)點(diǎn)的短距離無(wú)線通信協(xié)議,滿足了小型、低成本的同定、便攜或移動(dòng)設(shè)備無(wú)線聯(lián)網(wǎng)的要求。由于Zigbee的收發(fā)模塊體積小,功耗低,很容易直接安放在設(shè)備或工作人員的器械上,而且它們使用的是直序擴(kuò)頻技術(shù)。具有很好的抗十?dāng)_能力,能獲得更遠(yuǎn)的傳輸距離;此外,每個(gè)模塊都有接收強(qiáng)弱信號(hào)的指示功能(RSSI),易于直接觀察網(wǎng)絡(luò)信號(hào)的強(qiáng)弱;用該技術(shù)建立的無(wú)線網(wǎng)絡(luò)適合井下信息化管理系統(tǒng)的功能要求,通過(guò)使用覆蓋面積不同、功能不同的Zigbee網(wǎng)絡(luò)節(jié)點(diǎn),可形成低成本的無(wú)線收發(fā)模塊,從而建立起一個(gè)適應(yīng)信息化管理系統(tǒng)的井下無(wú)線局部網(wǎng)絡(luò).并隨時(shí)掌握井下人員的動(dòng)態(tài)分布。所以,越來(lái)越多的應(yīng)用都已直接利用現(xiàn)成的Zigbee無(wú)線通訊模塊來(lái)測(cè)定節(jié)點(diǎn)位置。因此,在充分研究現(xiàn)有Zigbee技術(shù)的基礎(chǔ)上,主要對(duì)Zigbee無(wú)線傳感器網(wǎng)絡(luò)定位系統(tǒng)的通信沖突和定位精度進(jìn)行分析,采用組團(tuán)協(xié)議,提出一種選取團(tuán)員的方法,使其更適合井下信息管理系統(tǒng)的要求。
2組團(tuán)協(xié)議
井下信息化管理系統(tǒng)的具體實(shí)施方法是。在坑道中每隔幾十米放置一個(gè)傳感器節(jié)點(diǎn),每個(gè)礦工身上也都佩帶一個(gè)這樣的節(jié)點(diǎn),礦工身上佩帶的節(jié)點(diǎn)和坑道中放置的節(jié)點(diǎn)可以自行組成一個(gè)大規(guī)模的無(wú)線傳感器網(wǎng)絡(luò)。在礦井入口處放置一個(gè)具有網(wǎng)關(guān)功能的節(jié)點(diǎn)作為Sink節(jié)點(diǎn),Sink節(jié)點(diǎn)連接傳感器網(wǎng)絡(luò)與Internet等外部網(wǎng)絡(luò),實(shí)現(xiàn)兩種協(xié)議棧之間的通信協(xié)議轉(zhuǎn)換,同時(shí)發(fā)布監(jiān)測(cè)中心的監(jiān)測(cè)任務(wù),并把收集的數(shù)據(jù)最后傳至監(jiān)控中心,從而全面了解礦井人員的安全狀況。
但是,由于主巷道、人車、采掘工作面等人員較為密集,為了實(shí)時(shí)監(jiān)控工作人員的位置信息,必須通過(guò)定位算法知道未知節(jié)點(diǎn)的位置。要求信標(biāo)節(jié)點(diǎn)每隔一個(gè)不長(zhǎng)的時(shí)間就廣播一次位置信息。此時(shí),未知位置節(jié)點(diǎn)就要與信標(biāo)節(jié)點(diǎn)進(jìn)行一次通信傳遞,以確認(rèn)信息并通過(guò)定位算法得到自己的位置信息,之后通過(guò)信標(biāo)節(jié)點(diǎn)向監(jiān)控中心報(bào)告自己的位置信息。如果兩個(gè)未知節(jié)點(diǎn)位置同時(shí)與信標(biāo)節(jié)點(diǎn)進(jìn)行通信就會(huì)造成信號(hào)沖突。然而Zigbee通信的退避機(jī)制有效地避免了這一狀況,它會(huì)事先進(jìn)行沖突檢測(cè),然后再發(fā)送信號(hào)。即使確實(shí)發(fā)生沖突,也有退避隨機(jī)時(shí)間重發(fā)的機(jī)制。不過(guò)如果未知節(jié)點(diǎn)位置的數(shù)量過(guò)多,當(dāng)未知節(jié)點(diǎn)位置同時(shí)向信標(biāo)節(jié)點(diǎn)發(fā)送位置信息時(shí),因一直都能檢測(cè)到?jīng)_突信號(hào),故無(wú)法發(fā)送。而且有些節(jié)點(diǎn),即使在退避了一段時(shí)間之后再一次重發(fā)也會(huì)發(fā)生沖突。同時(shí)信息不斷地重發(fā)也浪費(fèi)能量。最后終使網(wǎng)絡(luò)處于癱瘓狀態(tài),無(wú)法進(jìn)行通信。為了避免通信沖突和增強(qiáng)系統(tǒng)的功能性,可采用不讓每個(gè)未知節(jié)點(diǎn)位置都向信標(biāo)節(jié)點(diǎn)發(fā)送信息,而只從中選出一個(gè)代表向信標(biāo)節(jié)點(diǎn)發(fā)送信息。即采用組團(tuán)協(xié)議解決這一問(wèn)題。
3組團(tuán)協(xié)議模型分析
組團(tuán)協(xié)議的原理是將空間上相鄰的一群未知節(jié)點(diǎn)位置自行組成一個(gè)個(gè)團(tuán),并選出團(tuán)長(zhǎng),推舉團(tuán)長(zhǎng)作為代表與信標(biāo)節(jié)點(diǎn)進(jìn)行通信,以減少未知位置節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)之間的通信量,消除沖突問(wèn)題。圖1給出組團(tuán)協(xié)議模型。
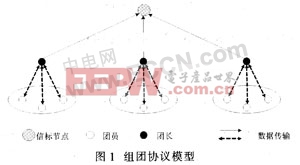 |
它不僅可以在人員密集時(shí)工作,也應(yīng)能在人員稀疏的地方運(yùn)行。當(dāng)節(jié)點(diǎn)是一個(gè)孤立的節(jié)點(diǎn)時(shí),該節(jié)點(diǎn)就是團(tuán)長(zhǎng);如果有節(jié)點(diǎn)加入時(shí),則要按照一定的算法選出一個(gè)團(tuán)長(zhǎng),即并團(tuán)。如果有節(jié)點(diǎn)離開時(shí)則要拆團(tuán),變成兩個(gè),甚至更多的團(tuán)。同時(shí)組團(tuán)時(shí)還應(yīng)考慮:
(1)單個(gè)節(jié)點(diǎn)也是團(tuán)長(zhǎng)。
(2)兩個(gè)或兩個(gè)以上的團(tuán)當(dāng)距離靠近時(shí),要進(jìn)行并團(tuán)。為了減少?gòu)?fù)雜度,采用兩兩并團(tuán)的原則。
(3)團(tuán)長(zhǎng)的選取。將最先接收到信號(hào)的節(jié)點(diǎn)作為團(tuán)長(zhǎng),并團(tuán)時(shí)最先接收信號(hào)的節(jié)點(diǎn)視為新團(tuán)長(zhǎng)。兩團(tuán)合并后,團(tuán)長(zhǎng)必須清楚新團(tuán)中的所有團(tuán)員的ID,而新團(tuán)的所有團(tuán)員必須知道新團(tuán)長(zhǎng)的ID。
(4)團(tuán)員的上限。應(yīng)當(dāng)對(duì)每個(gè)團(tuán)的團(tuán)員數(shù)做一個(gè)限定,例如限定30個(gè)團(tuán)員。這樣也就帶來(lái)了并團(tuán)的新問(wèn)題。所以,雖然團(tuán)員的上限是30,但存在一個(gè)過(guò)早飽和問(wèn)題。可以通過(guò)數(shù)學(xué)辦法定出該過(guò)早飽和的上限,例如27人。當(dāng)一個(gè)團(tuán)的人數(shù)達(dá)到27人時(shí),則認(rèn)為接近飽和。
(5)團(tuán)員的離開。團(tuán)員離開時(shí),要進(jìn)行拆團(tuán)。當(dāng)有一個(gè)團(tuán)員離團(tuán)時(shí),該團(tuán)員便成為單獨(dú)的團(tuán)長(zhǎng)。當(dāng)有幾個(gè)團(tuán)員同時(shí)離開的時(shí)候,便視每個(gè)團(tuán)員為單獨(dú)的新團(tuán)長(zhǎng),讓其自己重新并團(tuán)。并團(tuán)也是要解決的問(wèn)題,拆團(tuán)在某種程度上可轉(zhuǎn)化成并團(tuán),使得協(xié)議的實(shí)現(xiàn)簡(jiǎn)單可靠。
(6)節(jié)點(diǎn)的通信距離問(wèn)題。應(yīng)盡可能地減少通信次數(shù),簡(jiǎn)化通信幀的結(jié)構(gòu),爭(zhēng)取通過(guò)3次握手實(shí)現(xiàn)拼團(tuán)。
4組團(tuán)協(xié)議中團(tuán)員選擇的研究
團(tuán)長(zhǎng)的選取是將最先接收到信號(hào)的節(jié)點(diǎn)作為團(tuán)長(zhǎng),并團(tuán)時(shí)則將最先接收信號(hào)的節(jié)點(diǎn)作為新團(tuán)長(zhǎng)。對(duì)于團(tuán)員的選擇,可通過(guò)與團(tuán)長(zhǎng)的RSSI相似度進(jìn)行選擇。若比團(tuán)長(zhǎng)的RSSI相似度高,則說(shuō)明兩個(gè)傳感器節(jié)點(diǎn)的周圍環(huán)境相似,且位置相近,則成為團(tuán)員,把這樣的一些團(tuán)員組成一個(gè)團(tuán)。組團(tuán)以后。只有團(tuán)長(zhǎng)進(jìn)行定位計(jì)算,得到的佗置坐標(biāo)也為團(tuán)員的位置。這樣的選擇在一定程度上可提高定位精度。
4.1方案設(shè)計(jì)
接收信號(hào)的強(qiáng)度RSSI是傳感器節(jié)點(diǎn)間通信時(shí)接收方一端的傳感器節(jié)點(diǎn)獲得通訊信號(hào)強(qiáng)度的一個(gè)量化值。RSSI值從客觀上能夠反映兩個(gè)傳感器節(jié)點(diǎn)周圍環(huán)境的相似情況。例如兩個(gè)傳感器節(jié)點(diǎn)在空間上相距很近,而且周圍環(huán)境相似(溫度、濕度、障礙物等),因此可能成為鄰居節(jié)點(diǎn),而且接收到的信標(biāo)節(jié)點(diǎn)信號(hào)強(qiáng)度RSSI也會(huì)接近。如圖2,傳感器節(jié)點(diǎn)A,B在空間距離上相距比較近,周圍情況也較相似,因此從所有鄰居節(jié)點(diǎn)接收到的信號(hào)強(qiáng)度RSSIA=[RA1,RA2,…,RAn],RSSIB=[RB1,RB2,…,RBn]也都較為相似。







評(píng)論