基于ZigBee技術的角度同步采集傳輸系統(tǒng)設計

 本文引用地址:http://www.104case.com/article/188842.htm
本文引用地址:http://www.104case.com/article/188842.htm
前6個時隙內,主節(jié)點依次對各子節(jié)點進行輪詢,獲取角度信息并對其進行校驗。后2個時隙用于重傳,當1個或多個子節(jié)點的信息丟失或校驗發(fā)生錯誤時,采取“先丟失/出錯,先重傳”的方式進行重傳。
每個時隙內,主節(jié)點發(fā)送“開始傳輸角度信息”的命令幀至指定子節(jié)點,并啟動時隙超時定時器。子節(jié)點在接收到該命令幀后,立刻將從編碼盤信息中提取出的有效角度信息封裝成幀,經由射頻模塊發(fā)送給主節(jié)點。當定時器超時時,主節(jié)點若還未收到該子節(jié)點的角度信息幀,或收到角度信息幀但校驗錯誤,則記錄該子節(jié)點的編號(以便在重傳時隙內令其重發(fā)),并轉入輪詢下一子節(jié)點。若接收到正確報文,則直接轉入下一子節(jié)點的輪詢。
4.3子節(jié)點采集時刻同步
組網完成之后,主節(jié)點無線發(fā)送角度采集廣播給各個子節(jié)點,指示其以一定頻率采集編碼盤信息,提取并發(fā)送有效的角度信息。由于主節(jié)點以無線方式發(fā)送角度采集廣播,該廣播到達各個子節(jié)點的時間可能并不一致。若子節(jié)點在收到該廣播后立刻開始讀取編碼盤信息,子節(jié)點所讀到并提取的關節(jié)角度并不是同一時刻點的,導致測量機無法準確工作,所以需要有“子節(jié)點采集時刻同步”的環(huán)節(jié)。
我們采取的做法是:在組網完成之后,主節(jié)點發(fā)送角度采集廣播之前, 6個子節(jié)點逐一與主節(jié)點進行信息交互,子節(jié)點求取出信息幀的空中傳輸時間ti(i為子節(jié)點的編號,i=1,2…6;)。當所有子節(jié)點接收到主節(jié)點發(fā)送的角度采集廣播后,分別延遲(T C ti)時間再采集編碼盤信息,其中T為常數(shù),T>max[t1, t2, …t6]。那么,從主節(jié)點發(fā)送角度采集廣播的那一時刻開始,各子節(jié)點都經過了[ti +(T C ti)] = T時間后讀取編碼盤信息,實現(xiàn)了子節(jié)點采集時刻同步。
求取信息幀空中傳輸時間ti的具體過程如圖5所示。子節(jié)點i在Ti1時刻發(fā)送一個“請求時間校正幀”給主節(jié)點,主節(jié)點在Ti2時刻收到該幀,并于Ti3時刻回復第一個應答幀,應答幀的內容為時刻Ti2。子節(jié)點在Ti4時刻收到應答幀,獲得時間Ti2。主節(jié)點在Ti3時刻后任意延遲一段時間發(fā)送第二個應答幀,應答幀的內容為時刻Ti3,使子節(jié)點能在某時刻獲取時間Ti3。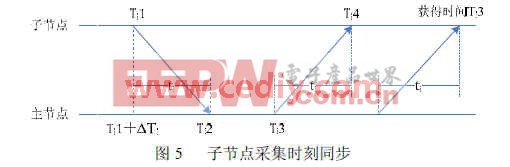
注:在此我們假定,信息幀由主節(jié)點發(fā)送至子節(jié)點需要的空中傳輸時間和信息幀由子節(jié)點發(fā)送至主節(jié)點需要的空中傳輸時間相同且穩(wěn)定。且信息幀長度等于主節(jié)點發(fā)送的“角度采集廣播幀”長度。
假設主節(jié)點的時鐘超前子節(jié)點△Ti,信息幀的空中傳輸時間為ti,可得:
Ti2 = Ti1 + △Ti + ti ①
Ti4 = Ti3 - △Ti + ti ②
由式①和②聯(lián)立可得:
△Ti = (Ti2 - Ti1 - Ti4 + Ti3)/2
ti = (Ti2 - Ti1 + Ti4 - Ti3)/2
5.主節(jié)點和工控機的通信
主節(jié)點和工控機采用RS-232 串行數(shù)據(jù)傳輸,串行口通信方式為異步串行通信,速率為19200bps,信息格式為1位開始位、8 位數(shù)據(jù)位、1個停止位、無奇偶校驗位,采用中斷方式進行數(shù)據(jù)傳輸。以下是串口初始化程序片斷:
void ConsoleInit(void)
{
#if defined(USART_USE_BRGH_HIGH)
TXSTA = 0x24;//設置串口發(fā)送狀態(tài)寄存器
#else
TXSTA = 0x20;
#endif
RCSTA = 0x90; //設置串口接收狀態(tài)寄存器
// SPBRG_VAL = CLOCK_FREQ/BAUD_RATE/64 C 1,BAUD_RATE=19200bps
SPBRG = SPBRG_VAL;
TXIE = 1;//默認情況下串口處于發(fā)送狀態(tài),使能發(fā)送中斷
TXIP = 1;
//RCIE = 1;//若需要執(zhí)行串口接收,使能發(fā)送中斷
//RCIP = 1;
}
6.結論
將信息傳輸無線化,可免去關節(jié)臂式測量機的臂內電纜線,實現(xiàn)關節(jié)的無限旋轉。本文設計的“基于ZigBee技術的角度同步采集傳輸系統(tǒng)”的無線硬件設計、軟件設計解決方案經測試運行穩(wěn)定,無線通信誤碼率低、可靠性高、安全性好。在室內測試環(huán)境下,無線收發(fā)速率可以穩(wěn)定達到18kbps,重傳后誤碼率不高于10¬-5數(shù)量級.
本文作者創(chuàng)新點:將ZigBee無線通信技術與機械測量相結合,設計了一套基于ZigBee技術的角度同步采集傳輸系統(tǒng),應用在關節(jié)臂式測量機上,實現(xiàn)了關節(jié)的無限旋轉。







評論