基于CAN總線的仿人機器人力信息檢測系統

選用TMS320LF2407作為主處理器。它采用實時信號處理體系結構,可達到30×106條指令/s的執行速度,供電電壓為3.3V,功耗低,片內外設中集成有控制器局域網絡(CAN)2.0B模塊和SCI模塊。
傳輸數據主要包括兩個力/力矩傳感器的五維力信息和經過預處理得到的數據,因此雙端口RAM選用IDT7132(2K×8bit)。一個端口接PC/104總線的數據線、低位地址線、高位地址譯碼產生的選通信號以及讀寫信號,譯碼通過MAX7032,根據上位機的空閑地址分配RAM地址;另一個端口接經過電平轉換的DSP數據線低位地址線、高位地址譯碼產生的選通信號以及讀寫信號,通過SN74LV08A譯碼,分配的地址為F800~FFFF,通過SN74LV245A完成總線驅動和電平轉換。
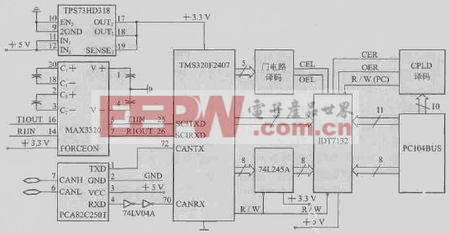
圖4 接口電路原理圖
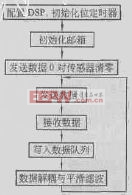
圖5 力信息采集與預處理基本流程
選取PCA82C250T作為驅動CAN控制器和物理總線間的接口,提供對總線的差動發送和接收功能。同時利用DSP的SCI模塊擴展了一路RS232串口,選用3.3V供電的RS232驅動器MAX3320作為串口驅動器,與PC機進行通信。
接口電路的軟件流程
接口電路驅動程序中,首先對DSP進行初始化設置,包括定時器初始化和CAN模塊初始化以及在IDT7132中設置平滑數據隊列等;然后向發送郵箱中寫入0或1,即對傳感器清零或者請求發送數據;接收到數據之后,將數據從接收郵箱中讀入平滑數據隊列中,進行平滑數據處理,供上位機查詢和讀取。
在DSP的初始化設置中,首先通過設置MCR寄存器來配置CAN引腳;初始化位定時器主要是設置寄存器BCR1和BCR2,決定CAN控制器的通信波特率、同步跳轉寬度、采樣次數和重同步方式。對郵箱的初始化主要是設置郵箱的標識符;對發送的數據區賦初值,需要清零傳感器返回值時,數據區賦值0,需要讀取數據時,數據區賦值1。發送信息首先要使能發送郵箱,然后設置發送請求位,等待發送中斷標志位置位,若為1,則發送成功,最后清除發送中斷標志位和發送應答位。接受信息時,要對接收郵箱進行初始化,設置標識符以及與標識符相關的局部屏蔽寄存器(LAM);然后等待接收中斷標志位MIFn置位,若MIFn=1則接收成功,最后清除接收中斷標志位和接收信息懸掛位。接收數據后,根據傳感器解耦矩陣完成數據解耦及平滑濾波。
根據文中提出的設計方法,已設計相應的電路,實現了對力信息的實時采集和傳送。所設計的系統能夠完成力信息采集和平滑預處理工作,但還沒有加入對力信息的數字濾波設計。通過對所采集的力信息數據的特性分析,下一步將在軟件流程中增加數字濾波部分,使獲取的力信息能夠更加真實地反映機器人所受到的地面反力信息,使力信息能夠應用于仿人機器人的大回路控制。

電度表相關文章:電度表原理










評論