基于CMAC神經網絡的PID參數自整定方法的研究

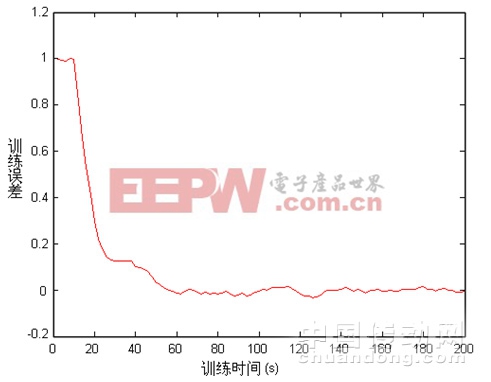
圖5所示為1620組訓練數據送入CMAC神經網絡訓練后,訓練數據在各個誤差區間中的個數,可看出超過90%的訓練數據具有較高的誤差精度,即誤差精度0.1。
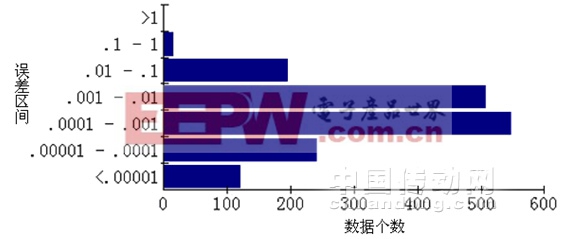
圖5訓練數據在各誤差區間中的個數
Fig.5Numbersoftrainingdataindifferentsectionoferror
把選取的2000種特征參數模塊中剩下的380組作為測試集,對訓練后的CMAC參數整定網絡進行測試。輸出的控制參數變化值與學習樣本期望結果進行對比,錯誤率為7.8%,說明CMAC網絡訓練比較成功,具有一定的泛化能力。圖6所示為CMAC神經網絡的測試誤差曲線。圖7所示為測試數據在各誤差區間中的個數。
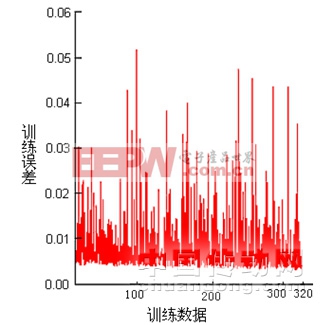
圖6CMAC測試誤差曲線
Fig.6TestingerrorcurveofCMAC
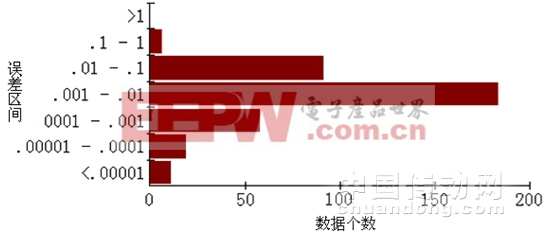
圖7測試數據在各誤差區間中的個數
Fig.7Numbersoftestingdataindifferentsectionoferror
5仿真結果
選取被控對象為: ,原控制器對此對象的控制性能達到要求,階躍擾動曲線如圖8中線1所示。當進行PID參數自整定,整定后的響應曲線為圖8中線2,把特征參量送入CMAC參數整定網絡,整定后參數為
,原控制器對此對象的控制性能達到要求,階躍擾動曲線如圖8中線1所示。當進行PID參數自整定,整定后的響應曲線為圖8中線2,把特征參量送入CMAC參數整定網絡,整定后參數為 。從仿真圖中,我們可以看出PID參數的整定效果比較理想,且CMAC神經網絡的達到穩定的訓練時間也比較短。
。從仿真圖中,我們可以看出PID參數的整定效果比較理想,且CMAC神經網絡的達到穩定的訓練時間也比較短。
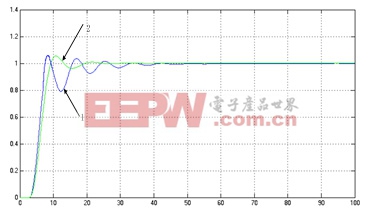
圖8整定前后的響應曲線
6結論
仿真結果表明,CMAC神經網絡的特性使其適合在PID參數自整定中使用。CMAC神經網絡權值的調整是局部的,學習速度快,收斂性好,而且PID參數的整定效果也滿足整定要求。文章的創新點:在基于模式識別的PID參數自整定系統中,直接利用CMAC網絡獲取整定規則,避免了傳統的大量專家整定經驗的建立。

pid控制器相關文章:pid控制器原理



評論