接口協議智能編解碼方法研究

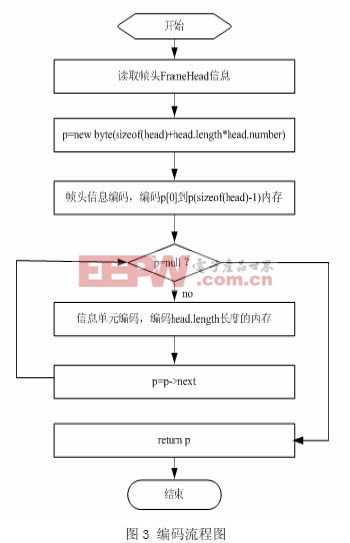
在進行程序編解碼時,從幀頭入手,先對控制信息進行編解碼,然后對每個信息單元編碼。對信息單元編碼時,以信息元素為最小信息體,依照編解碼規則對每個信息元素進行編解碼。
編碼設計的程序流程如圖3 所示。解碼即為編碼的逆過程。
依據編解碼規則的XML 文檔和報文編解碼的數據結構里的信息我就們就可以對報文進行編碼和解碼了。編碼的實質就是將信息依據編碼規則轉化成二進制的代碼;解碼是它的逆過程。編碼的實現其實就是對計算機內存的位操作。如果某項信息(信息元素)在編碼信息單元內占用了i n 到i+k 1 n 的K 位,那么我們編碼的任務就是依據實際信息將這K 位填充。在對位進行操作時,一般的方法是先定位所操作的位所屬的字節,然后取出這一字節的信息,再接下來用“|”操作對其進行寫操作。比如,要將一個128 位數據中的第100 位置1,我們先取出第100/8 + 1=13個字節的信息,然后再將這個字節的信息“|”上“1000”。這樣,循環K 次便可完成這個信息元素的編碼。有一種情況就是連續的K 位信息在一個字節內,這時,我們只需要進行一次操作便可完成此信息元素K 位的編碼。這種編碼方法的優點是輔助編碼的空間占用少;速度也比較高,尤其是信息元素編碼都在一個字節內時。
在編碼時,我們還可以采取另外一種函數實現上更加快捷的方法。這種編碼方法的思想是先將編碼信息的每一位放在一個字節空間中,然后按由低到高的順序將每八個字節空間的信息轉換到信息編碼單元中的一個字節。這樣的好處是便于處理跨字節的信息元素編碼,思路新穎。
顯然,可以根據以上思路設計出兩種解碼函數,它們分別是上述編碼函數的逆過程。經過測試,發現在信息單元長度不超過512 位時,上述兩種方法的效率基本一樣;在信息單元長度很大時,第二種方法會稍快些。
3 編解碼方法舉例
按照以上思路,飛機A 報告自身位置的報文編解碼的設計如下。
飛機自身的位置信息屬于態勢信息,包括經度(LONG)和緯度(lat)、高程(H)。編解碼的任務就是處理這三種信息。
首先,將編解碼規則整理成XML 文檔。這一步是編解碼的前提和基礎。一般,一個XML 文檔對應一種規則,整理一次以后,以后的編解碼即可反復利用此XML 文檔。
然后,填充編解碼的幀頭信息(幀頭編解碼)。編碼時關鍵代碼如下:
FrameHead PosHead; Unit *p=NULL; //幀頭,信息單元申明
//信息單元處理
p-> unit_number=“State_SelfPos”;
memset(p->send_elemet,0,MAX_ELE);
p->send_elemet[1]= p->send_elemet[2]= p->send_elemet[3]=1; //假定高度、緯度和經
度//是規則中的前三個信息元素
p->next=NULL;
//幀頭處理
PosHead.frame_number= “PosHead_
PosHead .type = 1 ; //報文類型(發送)
PosHead .start = “plane_A ”; //發送方
PosHead .destination= “alert”; //接收方
PosHead .number=1; //編碼信息單元數量
PosHead .length=128; //編解碼信息單元長度
PosHead.responsion=1; //應答控制(確認收到)
PosHead .resposion_number=NULL; //所應答報文的編號
PosHead .chunnel=1; //發送通道
PosHead.info=p; //第一個編解碼信息單元
接下來,調用編碼函數進行編碼,這樣就將信息轉化成為了二進制代碼。最后,接收方解碼此信息,調用解碼函數。
4 結論
本文中提出的報文編解碼方法,在復雜信息系統仿真中已經得到廣泛應用。實踐證明,有如下特點:
編解碼速度快,完全能夠滿足復雜信息系統仿真通信的要求;
協議的改變不影響仿真系統軟件,接口協議的數據處理和仿真程序分離;
不同的復雜信息系統仿真都可以使用這種方法,接口協議的編解碼程序代碼具有可移植性。
本文作者創新點:針對接口協議的復雜性和靈活性,提出了一種新穎的編解碼方法,有效的解決了接口協議種類多、編解碼方式靈活等問題;而且方法已經應用于863 計劃項目,取得了良好的效果。



評論