微處理器在導航設備模擬信號處理中的應用

2.2 數模變換(DAC)
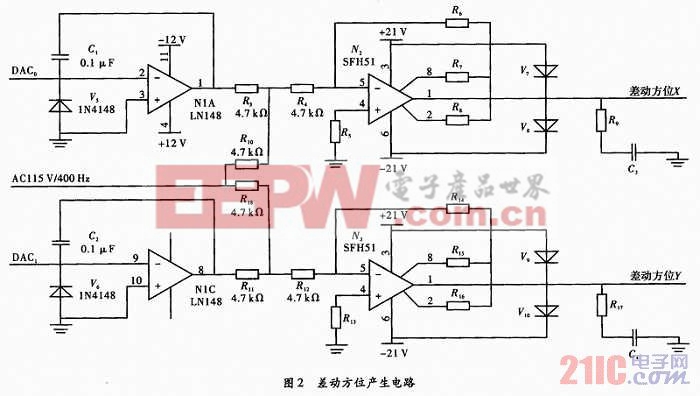
當從磁方位信號中解調出磁方位角后,可以計算出差動方位角度,根據具體硬件電路參數,可進一步推算出該角度對應的DAC轉換需要的數字量,然后將數字量送入DAC中,在交流基準的調制下便可得到模擬的差動方位信號,電路如圖2所示。本文引用地址:http://www.104case.com/article/187510.htm
3 軟件的實現
3.1磁方位解算
對于三相磁方位信號X,Y,Z,通常Z接地。假設磁方位為φ,則有

根據前面分析,VXZ即為磁方位信號X的ADC采樣值,VYZ為磁方位信號Y的ADC采樣值,由此可根據上述公式計算出磁方位角度。
3.2 差動方位產生
根據差動方位信號的要求和電路參數計算,差動方位X和差動方位Y分別表示為
![]()
其中,θ為數字方位;φ為磁方位,ω=2πft,f=400 Hz;根據實際電路模型,有

其中,DX為差動方位X向數模轉換器的數字量;DY為差動方位Y向數模轉換器的數字量。
4 結束語
通過上述硬件線路設計和軟件設計,開展了相關課題實驗,并應用到某導航設備中,其集成度和可靠性得到了進一步提高,指標均達到了設計要求。









評論