程控增益低噪聲寬帶直流放大器的設計

2.5 程序控制模塊
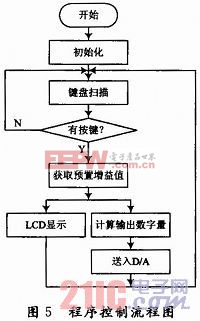
該設計的系統控制核心采用STC89F52單片機,內部資源豐富。用單片機實現人機交互和外圍控制,分別對單片機和液晶初始化,并根據預置增益值進行一定的運算,驅動D/A產生所需的控制電壓。程序控制流程如圖5所示。本文引用地址:http://www.104case.com/article/186323.htm
3 改善放大器性能的措施
3.1 增益起伏控制
由于AGC對不同頻率輸入信號的增益不完全相同,所以會造成增益譜不平坦,即有增益起伏。該設計選用的AD603其內部含有負反饋,可以較好地控制增益起伏。另外,在放大器的輸出端對地接耦合小電容47 pF和2μH電感等措施進行補償,從而將增益起伏控制在1 dB以下。
3.2 線性相位
由于系統對不同頻率的信號響應產生的延時有可能不同,所以會產生相移(落后或超前)。要使所有頻率的輸入具有相同的相位,則需設計線性相位濾波器,通常采用FIR濾波器,也可以采用模擬的方法。該設計采用電壓并聯負反饋,較好地抑制了相位漂移。
3.3 抑制直流零點漂移
零點漂移是指輸入為零時輸出端仍有緩慢變換的輸出電壓的現象,實際中常采用補償的方法來抑制零點漂移。多級級聯時,為防止溫漂逐級遞增,必須采用阻容耦合或變壓器耦合。在此設計中,在放大器之前設計了一個輸入緩沖級,采用低溫漂的運算放大器TL4031,對輸入的小信號進行適當的放大,使輸入信號遠大于溫漂,這樣溫漂的影響便可忽略。同時,在功率放大器輸入端設置了調零功能。
3.4 放大器的穩定性
由于晶體管有反向傳輸導納存在,會產生自激,影響放大器的穩定性。為了提高運放的穩定性,可以從電路上設法消除晶體管的反向作用,采用失配法使其單向化。由于高頻信號通過兩級級聯的AD603很容易產生自激,因此采取了2種抑制自激的方法:
(1)在可控增益放大器的控制端加電感以及在其輸出端加濾波電路來濾除高頻噪聲;
(2)在功率放大器的反饋端加一小電容以防止輸出的高頻大信號耦合到輸入端;
4 結語
該系統基于低噪聲增益可程控集成運算放大器AD603和高頻三極管2N2219和2N2905等器件設計的寬帶直流放大器具有低噪聲、高增益、增益可程控(從0~53 dB)、輸出電壓幅度在50 Ω負載上最大可達10 V、帶寬最大為8 MHz、帶寬可選擇等眾多優點。在實際運用過程中證明該放大器在自動化要求較高的系統中具有很好的應用。

評論