無(wú)線充電器技術(shù)和解決方案
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
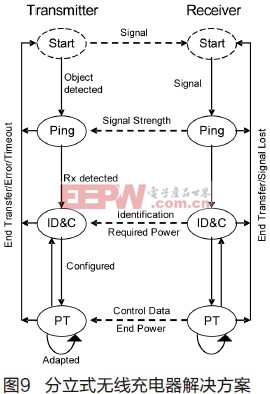
Ping
本文引用地址:http://www.104case.com/article/184611.htm在Ping階段,功率發(fā)射器應(yīng)執(zhí)行數(shù)字Ping。它檢查潛在功率接收器是否為功率接收器或功率接收器是否需要功率傳輸。因此功率發(fā)射器為主線圈供電時(shí)間最長(zhǎng)達(dá)65ms。功率接收器必須在此時(shí)間內(nèi)通過(guò)負(fù)載調(diào)制回應(yīng)。完成此操作后,系統(tǒng)將進(jìn)入下一階段,即標(biāo)識(shí)和配置階段。如果未完成,系統(tǒng)應(yīng)返回上一階段,即選擇階段。
標(biāo)識(shí)和配置
在標(biāo)識(shí)和配置階段,功率發(fā)射器應(yīng)能識(shí)別功率接收器,而功率接收器應(yīng)傳輸配置信息,如功率接收器的基本設(shè)備標(biāo)識(shí)符、功率接收器應(yīng)提供給其整流器輸出、功率發(fā)射器的最大功率量。功率發(fā)射器接收此信息并調(diào)節(jié)工作點(diǎn),然后進(jìn)入功率傳輸階段。如果功率發(fā)射器因任何原因無(wú)法從功率接收器正確接收識(shí)別和配置信息,如功率接收器無(wú)法發(fā)送數(shù)據(jù)包或功率發(fā)射器無(wú)法解調(diào)正確信息,功率發(fā)射器應(yīng)返回上一階段,即選擇階段。
功率傳輸
在功率傳輸階段,功率發(fā)射器將向功率接收器提供持續(xù)功率,并響應(yīng)從功率接收器接收的控制數(shù)據(jù),調(diào)節(jié)功率傳輸工作點(diǎn)。在功率傳輸階段,功率發(fā)射器應(yīng)監(jiān)控功率傳輸參數(shù)。如果任何參數(shù)超出限制,將中止功率傳輸并返回選擇階段。最后,從功率接收器接收了終止傳輸數(shù)據(jù)包時(shí),功率發(fā)射器將終止功率傳輸。例如,當(dāng)電池滿電時(shí),功率接收器無(wú)需再對(duì)電池充電。它應(yīng)將終止功率傳輸數(shù)據(jù)包信息發(fā)送至功率發(fā)射器,以終止功率傳輸。然后,系統(tǒng)將返回選擇階段。它將保持在前三個(gè)階段,直到功率發(fā)射器上放置新的功率接收器或更改了配置信息。
分立式無(wú)線充電器解決方案
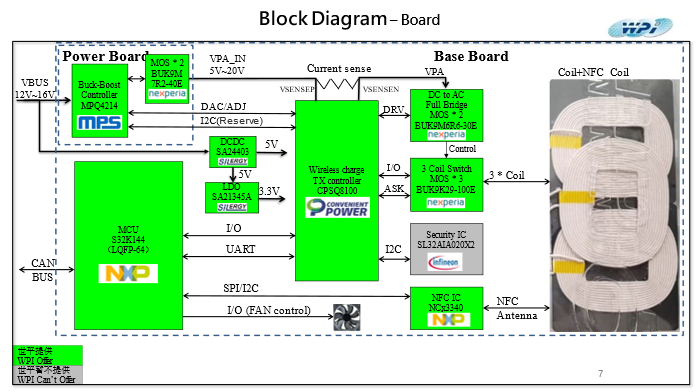
我們可以輕松設(shè)計(jì)一個(gè)具有一些分立式設(shè)備的無(wú)線充電器系統(tǒng),其與以上所示的Qi標(biāo)準(zhǔn)兼容。圖9顯示其中一個(gè)無(wú)線充電器分立式解決方案。
在發(fā)射器端,微控制器單元(MCU)用于控制發(fā)射器的整個(gè)功能。MCU生成脈寬調(diào)制(PWM)波以驅(qū)動(dòng)?xùn)艠O驅(qū)動(dòng)器。PWM的頻率和占空比由MCU控制。MCU根據(jù)從接收器接收的錯(cuò)誤控制數(shù)據(jù)包控制這兩個(gè)參數(shù)。FAN73932為半橋柵極驅(qū)動(dòng)器,它將接收的矩形波轉(zhuǎn)換為兩個(gè)非重疊信號(hào),以驅(qū)動(dòng)低端和高端MOSFET。DC至AC功能由此設(shè)備和兩個(gè)N-MOSFET實(shí)現(xiàn)。發(fā)射器線圈由AC波驅(qū)動(dòng)。串聯(lián)電容用于與發(fā)射器線圈形成一個(gè)串聯(lián)諧振電路,以實(shí)現(xiàn)更好的功率傳輸性能。功率可以此方式傳輸。FAN8303為DC-DC轉(zhuǎn)換器,為MCU電源提供5V電壓。另一部分為通信部分。電容用于從線圈獲取電壓,并將此電壓發(fā)送至MCU ADC以獲取通信信息。我們也可使用感測(cè)電阻和電壓放大器來(lái)檢查發(fā)射器線圈的電流變化。
在接收器端,也采用MCU來(lái)控制接收器的所有操作。具有接收器線圈的串聯(lián)諧振電路由電容構(gòu)成。當(dāng)接收器線圈放在發(fā)射器線圈上時(shí),我們可在此串聯(lián)諧振電路的末端獲得AC電壓。AC至DC功能由具有兩個(gè)N-MOSFET和兩個(gè)二極管的全橋整流器實(shí)現(xiàn)。DC電壓在此電路輸出端獲取。該電壓可通過(guò)調(diào)節(jié)器電容使其穩(wěn)定。此電壓通過(guò)DC-DC轉(zhuǎn)換器(FAN8303)傳輸,在FAN8303設(shè)備的輸出端獲取穩(wěn)定的5V,用于MCU電源。MCU上電時(shí),它控制兩個(gè)MOSFET,以便與發(fā)射器通信。整個(gè)無(wú)線系統(tǒng)采用此方式配置。MCU將在完成正確配置后打開(kāi)輸出開(kāi)關(guān)。輸出電壓也可用于對(duì)便攜設(shè)備充電。充電電流和輸出電壓由MCU監(jiān)控,以了解何時(shí)需要終止充電。
在軟件方面,圖10顯示無(wú)線充電器發(fā)射器和接收器的簡(jiǎn)要流程圖。
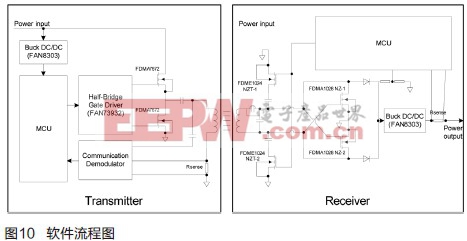
通過(guò)此類無(wú)線充電器系統(tǒng),系統(tǒng)可獲取5W充電電源,效率約為69%。

可控硅相關(guān)文章:可控硅工作原理
漏電開(kāi)關(guān)相關(guān)文章:漏電開(kāi)關(guān)原理 脈寬調(diào)制相關(guān)文章:脈寬調(diào)制原理





評(píng)論