全橋逆變單極性SPWM控制方式過零點振蕩的研究

關鍵詞:全橋逆變;單極性;正弦波脈寬調制;過零點振蕩
0 引言
當前眾多電源應用領域對交流電源的要求越來越高,傳統的電網直接供電方式在很多場合已無法滿足要求,因此,需要對電網或者其他能源處理后逆變輸出。高質量的逆變電源已經成為電源技術的重要研究對象。全橋架構又是逆變器中非常重要的架構。全橋逆變控制方式主要分為雙極性控制方式和單極性控制方式。雙極性控制是對角的一對開關為同步開關,橋臂上下管之間除死區時間外為互補開關,控制相對簡單,但是它的開關損耗高,存在很大的開關諧波,電磁干擾大,而單極性控制可以很好地解決這些問題。全橋逆變器單極性控制僅用一對高頻開關,相對于雙極性控制具有損耗低、電磁干擾小、無開關頻率級諧波等優點,正在取代雙極性逆變控制方式。但由于控制環路的延時作用,單極性控制方式的逆變器仍然受一個問題的困擾,即在過零點存在一個明顯的振蕩。單極性控制方式又包括單邊方式和雙邊方式,雙邊方式相對于單邊方式在抑止過零點振蕩方面有一定優勢[1],但仍然無法做到過零點的平滑過渡。為了提高逆變器的輸出波形質量,本文分析了,單極性雙邊控制方式,分析了其振蕩產生原因,并介紹一種解決過零點振蕩的方案。
l 主電路拓撲
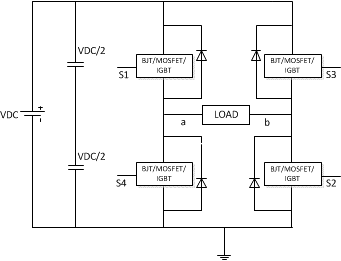
單極性SPWM逆變器如圖1所示,由2組橋臂構成,一組橋臂(S3,S4)以高頻開關工作頻率工作,稱為高頻臂;另一組橋臂(S1,S2)以輸出的正弦波頻率進行切換,稱為低頻臂。
2 單極性雙邊SPWM控制方式
單極性逆變有兩種產生SPWM的方法,分為單極性單邊SPWM控制方式和單極性雙邊SPWM控制方式,文獻l對此有比較詳盡的介紹,這里只介紹過零點特性較好的雙邊控制方式,這種方式對于單邊控制方式仍然有效。在單極性雙邊SPSM控制方式中,給定的載波信號按正弦方式變化,三角調制波信號,當輸出電壓為正時三角波為正,輸出電壓為負時三角波為負,如圖2所示。高頻臂上管S3的開關由載波與調制波相比較決定,載波幅值大于調制波則開通,載波幅值小于調制波則關斷,除去死區時間,高頻臂上管S3與高頻臂下管S4的開關完全互補。這樣即可得到SPWM規律的高頻臂開關信號,實現逆變器的正弦波輸出。
3 過零點振蕩分析
圖3為雙邊SPWM控制方法在過零點附近的SPWM示意圖。圖中E1理論上為跟基準(電壓波形)同相位的誤差信號,由于在電壓環和電流環兩個環節中存在積分環節,實際的誤差信號E2會與基準信號相差一個相位。圖3中SPWM1是理論上的高頻臂上管(S3)的驅動信號,SPWM2則是實際的高頻臂上管(S3)的驅動信號。
1)to~t1區間 由圖3可以看到,在to~t1.區間,由于給定的低頻臂信號為高電平l,對應主電路低頻臂下管(S2)導通,圖3中SPWM對應的高頻臂上管(S3)的驅動信號,當誤差信號(E1或E2)大于三角波,比較器輸出高電平,小于則輸出低電平,以此獲得SPWM1或SPWM2。由圖3可以知道在to~t1區間,輸出正弦波由正逐漸變為O。由于E2滯后于理想的誤差信號E1,,在t1時刻正
半波向負半波轉變時E2會大于E1,造成的影響就是過零點附近實際的占空比SPWM2要大于SPWM1。理論上此時的正弦波輸出逐步減小到零,到零后再進行低頻臂的切換,而事實上并不是降到零就會進行低頻臂的切換。
2)t1~t2區間 實際的輸出誤差信號E2滯后于E1一個相位,在該相位內,誤差信號E2為正,始終大于調制波信號,因此高頻臂上管(S3)始終開通,下管(S4)始終關斷。在該時段內,SPWM偏離了正弦波調制的規律,因此輸出也就無法維持正弦波規律。這個時段與控制環的參數有關,一般在數百μs左右,表現為正弦波在過零點有一個振蕩。
4 過零點振蕩的觀察結果
以一個單極性雙邊SPWM控制的110v/25Hz逆變器為例。電流環的輸出如圖4所示,在過零點處有一個很明顯的振蕩。將該振蕩展開,如圖5所示,CHl為電流環輸出,CH2為低頻臂信號。可見在低頻臂切換后,電流環的輸出會有一個過沖,這個過沖會達到運放的飽和值,持續時間100~200μs。這個控制信號過沖在逆變輸出中的表現為過零點有一個過沖,從正向到負向的切換表現為向下的過沖,負向到正向的切換表現為一個向上的過沖,大為影響了輸出波形的平滑性。逆變輸出過零點的觀察結果如圖6。過沖的峰值達到了22V,相對于110V的峰值電壓156V,擾動相對值為14%。由實驗觀察可以比較出,電壓環在低頻臂切換點的響應很微弱,不足以造成大的振蕩。由于電流環則因為其快速反應的特性,出現了飽和現象,而電流環的輸出直接送至PWM發生器,因此會直接反映在逆變器的輸出上。
5 解決方案
由上面的分析可知,對于單極性SPWM全橋逆變器,由于它的電流環和電壓環都存在積分環節,因此,誤差信號相對于給定信號不可避免存在一個延遲,這個延遲在非零點附近不會對系統的輸出造成影響。但是,在過零點附近,由于單極性SPWM需要換向,積分環節的延遲就會造成一個振蕩。這是由控制系統本身缺陷所致,若要消除該振蕩,就需要改進控制系統,以消除積分環節延遲的影響。
圖7所示為電流環積分電容上的電壓,在低頻臂切換后出現了一個過沖。這是因為在切換點電流環的快速切換,需要運放在大約100~200μs里傳遞一個較大的能量,而積分電容吸收了這部分能量,造成運放的輸出端不能快速地跟蹤這個轉換。因此,如果在切換點使電流環在約1001μs的時段內由積分環節變為比例環節,將會有效地避免這個充放電過程,從而避免丁運放輸出點的過沖,也避免了逆變器過零點的振蕩。
圖8提出了一種解決過零點振蕩的調整電路方案。在該過零點調整電路中引入了G1、G2信號(低頻臂的上下橋臂的驅動信號),它們在低頻臂上下橋臂切換時發出一個約100μs的脈沖,這個脈沖開通光耦,將電流環上的積分電容短路,實現了切換階段的比例環節。
6 實驗結果
如圖9所示,在加入過零點調整電路后,電流環的輸出中消除了過零點的過沖。如圖10所示,逆變器的輸出在過零點消除了振蕩現象,相對于未加過零點凋整電路,逆變器過零點非常平滑。
7 結語
單極性雙邊SPWM控制方式的全橋逆變器,因為控制環路的積分延時效應造成過零點的明顯振蕩,可以通過修改過零點階段的電流控制環特性來消除積分效應,使得逆變器輸出過零點波形平滑,提高了逆變器的輸出質量。實驗結果表明該方案切實可行。










評論