基于DSP的逆變電源控制系統設計

2.3 模塊間并聯控制部分的設計
分散邏輯并聯控制方式可使各逆變電源模塊不依賴于集中控制單元或某個主模塊,能獨立的檢測和控制本模塊在系統中的工作狀態而實現模塊間的輸出功率合理分配,并能很好的抑制模塊間的環流,從而實現模塊化逆變電源在并聯電源系統中的獨立運行控制。
根據以上的分散邏輯控制理論分析,本設計中采用的分散控制的并聯冗余逆變器控制系統。在該系統設計中,模塊之間的CAN總線作為均流互聯線,同時從工程實際應用的角度考慮,在系統的中有引入了一組同步母線,由于同步母線和相應的同步控制策略大幅簡化了分散邏輯控制并聯冗余控制方案的實現。
(1)并機部分硬件結構
單機控制部分由DSP控制UC3524輸出產生PWM波形,從而控制單個逆變模塊輸出220Y,50HZ的交流電。檢測部分由DSP和各檢測電路組成,DSP實時檢測逆變器的輸出電壓、輸出電流、直流輸入電壓以及模塊溫度等各項參數,根據模塊當前的工作狀態控制模塊功率輸出。并機部分由DSP及并機接口電路組成,并機接口電路采用抗干擾能力強的CAN總線進行各逆變模塊之間的數據通信,DSP通過CAN總線發送本模塊的電壓、電流和功率等信息給其他逆變器模塊或者接收其它模塊傳送過來的電壓、電流和功率等信息,并將這些信息按均流控制算法,使各逆變模塊之間均衡負載。
(2)并機線的設計
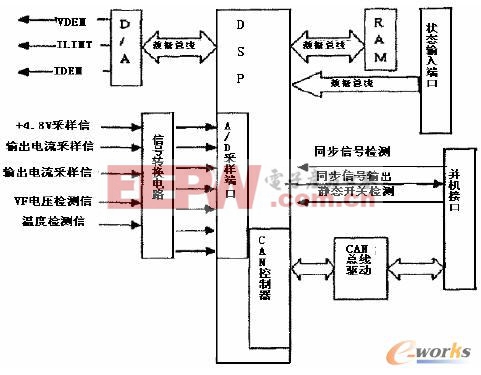
圖3 并機控制部分的硬件結構圖
由上圖3可知,在本系統中,逆變模塊間的并機線主要包括CAN總線和同步母線兩部分:
1)并機通信線
在本系統中,每個模塊采集各自逆變橋輸出端的電壓和電流,經過一定的計算后,通過CAN總線主動向其他的模塊傳送自己的電壓,電流和功率,由于CAN總線的傳輸速度高達1Mbps,幾乎是在每個模塊在其他模塊信息的同時,也獲取了其他模塊的信息。
假設逆變器并聯系統共16個模塊并聯,CAN總線的通信波特率為1Mbps,采用廣播的通信方式。由于CAN總線傳送一個數據幀共有10個字節,因此單個逆變器模塊將本模塊的數據傳送到其它逆變器模塊的時間為:信方式。由于CAN總線傳送一個數據幀共有10個字節,因此單個逆變器模塊將本模塊的數據傳送到其它逆變器模塊的時間為:t1=10*8b/1Mbps=80us。
在系統8個逆變器模塊并聯的情況下,所有模塊相互之間數據傳送完成共需要時間為:t=8*80us=0.64ms。
逆變器輸出一個50HZ的正弦波周期為20ms,模塊之間相互傳送信息一次需要的時間僅為0.64ms。這使得各個逆變電源模塊根據可以達到實時調節。根據無功電流(無功功率)的差異調整輸出電壓、電流的給定值和改變SPWM的調制波,調節模塊間因輸出電壓差異造成的無功電流差異,從而解決了無功功率的均衡問題。
2)同步母線
本系統中運用少許模擬器件設計了一種高效的同步母線,下圖是兩臺逆變器為例說明同步母線的連接圖。
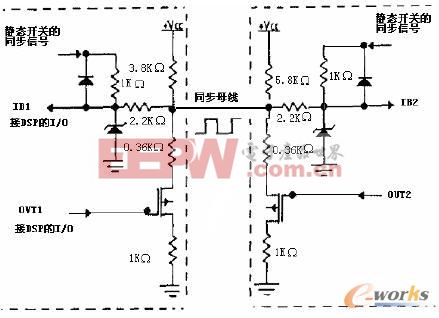
圖4 同步母線連接圖
兩個逆變模塊間只需一根模擬線相接,圖中每個模塊中的DSP控制器都有兩個通用I/O、分別用于對同步母線進行檢測和控制。每個模塊在對同步的電平信號進行檢測,與此同時通過端口OUT詳同步母線上發送本模塊的同步脈沖,實質上是,通過同步母線,各模塊之間的同步信號相互影響、相互跟蹤,從而達到同步。
3 結 論
本文設計了一套基于DSP控制的逆變電源并聯控制系統,并進行了各種性能實驗研究,實驗表明了本設計的可行性和有效性,可以實現多臺逆變模塊非聯電源系統可靠的運行以及功率均分。
文章的創新之處是實現多個逆變器模塊的并聯供電電源系統,以滿足不同的負載功率及供電可靠性要求。












評論