在4~20mA電流環中如何使用高壓、大電流驅動放大器

從±2.5V產生±20mA電流驅動
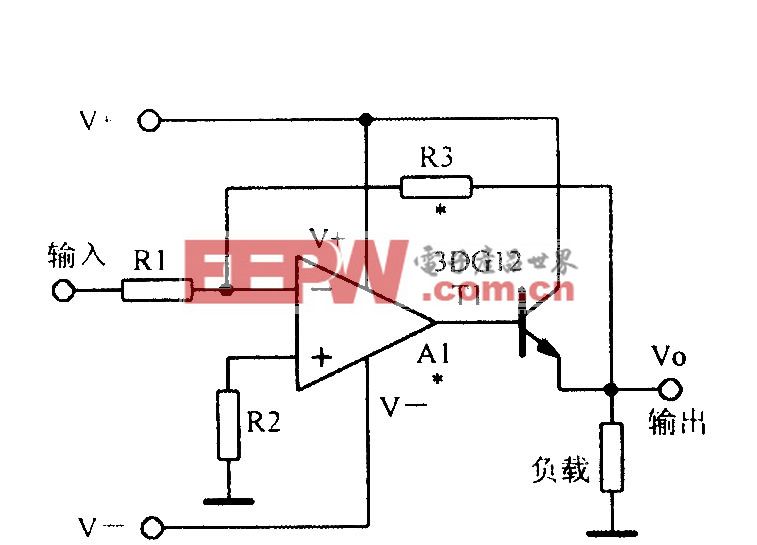
圖3所示電路亦可用來產生±20mA電流驅動。當VREF=0V時,-2.5~+2.5V的輸入范圍產生標稱±20mA的電流輸出,如圖4所示。輸入電壓(VIN)和“正向”運算放大器輸出電壓(V1)之間的關系如下:
VIN=(R2/R1)×(1-α/β)×V1+VREF×(1-(R2/R1)×1/(β×(R2+R1))) (2)
式中,α=(1/RSENSE)+R2/(R1×(R1+R2));β=(1/RSENSE)+(1/R1)+(1/RLOAD)
在式(2)中代入元件值:
V1=4.876×VIN-4.872×VREF (3)
式(3)中的關系式有助于避免輸出器件飽和。實際上,當VIN=2.5V時,下端運算放大器的輸出(V1)達到12.2V左右。如果輸入電壓超過2.5V,最終輸出器件將達到其飽和點,輸出電壓不再增大。圖4中曲線變得平坦,與理想特性曲線不一致。反相端輸入低于-2.5V時,將出現類似結果。
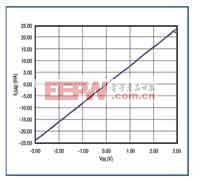
圖4 ±2.5V輸入電壓范圍可產生±20mA輸出電流
圖4數據說明,當源出、吸入電流達到大約±21.5mA時,相當于±2.68V輸入和正向(下端)運算放大器輸出達到±13V,MAX9943仍然能夠工作在線性范圍。因為MAX9943的輸出電壓能夠非常接近負電源電壓,實際負向電流可以達到較大幅度。該器件的正向輸出擺幅限制在正電源電壓的2V以內。
有些應用需要更大的輸出電流,以滿足設計裕量的需求或為校準保留一定空間。對于這類應用,圖3電路可采用±18V雙電源(代替±15V)供電。此時,運算放大器能夠驅動最大±24mA (對應于±3V輸入)的電流,并保持工作在線性區域,如圖5所示。
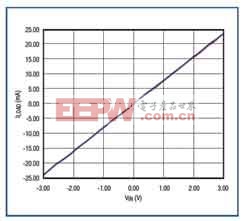
圖5 ±3V輸入電壓范圍可產生±24mA輸出電流
從0~2.5V輸入范圍產生4~20mA電流驅動
由式(3),當VREF=-0.25V、輸入范圍介于0~+2.5V時能夠產生2~22mA的電流輸出(見圖6)。通常在4~20mA電流環中,設計人員希望動態范圍具有一定的附加“空間”(例如,2~22mA),以便用于軟件校準。如果需要更大電流,MAX9943可以采用±18V雙電源供電,如上所述。
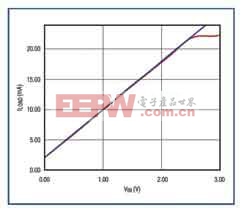
圖6 通過0~2.5V輸入電壓范圍產生4~20mA輸出電流
結論
電流環被廣泛用于需要將信息從遠端傳感器傳輸到中央處理單元,或從中心單元傳輸到遠端傳感器的工業應用。
實驗證明,MAX9943運算放大器非常適合將傳感器或DAC輸出的電壓信號轉換成4~20mA或±20mA電流的控制環應用。MAX9943在整個溫度范圍內都具有精密的大電流驅動能力。驅動高達1nF的容性負載時能夠保持穩定工作,而長距離傳輸中經常會遇到較大的容性負載。

基爾霍夫電流相關文章:基爾霍夫電流定律







評論