分析如何提高低靜態(tài)電流LDO的負(fù)載瞬變響應(yīng)性能

但圖3所示的這種方法還是不能妥善解決穩(wěn)定性問題。對于具有微小靜態(tài)電流的LDO來說,其偏置電流Ib也很小。而射極跟隨器的極點(diǎn)與誤差放大器A1的極點(diǎn)靠得很近。此外,這種方法將射極跟隨器用作了緩沖器,因此可以快速地關(guān)閉傳遞器件MP,但另一方面,電路的導(dǎo)通時(shí)間也由于小電流Ib而受到限制。
這種結(jié)構(gòu)的另一個(gè)缺點(diǎn)是由于主放大器和緩沖器是串聯(lián)的,所以延遲時(shí)間將由電路中速度較慢的部件來決定。
在結(jié)構(gòu)[3]中,LDO采用了兩個(gè)放大器,分別是誤差放大器A1和電流反饋放大器A2,如圖4所示。電流反饋放大器具有第二級反饋環(huán)路,可加速LDO的響應(yīng)。但是該放大器的輸入阻抗很小,會(huì)降低誤差放大器A1的增益下降,從而對LDO的主要參數(shù)帶來負(fù)面影響。
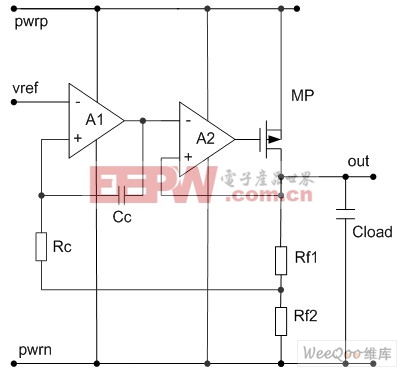
圖4:帶復(fù)合反饋回路的LDO。
電流反饋放大器具有AB類輸出級,但此類放大器的負(fù)載能力取決于輸入電流。然而,低靜態(tài)電流的LDO一般要求較大的Rf1、Rf2和RC電阻值,這又限制了放大器A2的輸入電流。這意味著最大輸出電流不會(huì)超過幾微安,因此無法實(shí)現(xiàn)對功率晶體管的寄生電容進(jìn)行快速充電。
推薦的改進(jìn)方法和電路結(jié)構(gòu)
前文已經(jīng)對不同的LDO負(fù)載瞬變性能改進(jìn)方案進(jìn)行了分析。盡管采用兩個(gè)運(yùn)算放大器驅(qū)動(dòng)傳遞器件似乎是最好的一個(gè)方法,但是通過上述分析仍可以發(fā)現(xiàn)若干缺點(diǎn)。本節(jié)將討論一種可以消除或減弱這些缺點(diǎn)的結(jié)構(gòu)。
在改進(jìn)的結(jié)構(gòu)中,具有高增益和低帶寬的運(yùn)算跨導(dǎo)放大器(OTA)被用作主要的誤差放大器。而這個(gè)放大器決定了LDO的主要性能參數(shù)。第二個(gè)放大器也是基于OTA,但具有相對較小的增益和較大的帶寬,主要用于監(jiān)測LDO的輸出。兩個(gè)放大器的輸出并聯(lián)在一起,推薦結(jié)構(gòu)如圖5所示。
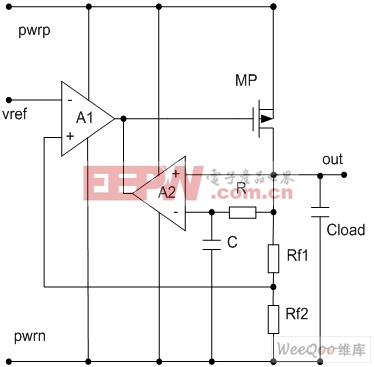
圖5:兩個(gè)誤差放大器并聯(lián)在一起的LDO結(jié)構(gòu)。
主誤差放大器A1為一款標(biāo)準(zhǔn)的兩級放大器,用于確保LDO的良好性能。由于A1并不是用來快速驅(qū)動(dòng)功率晶體管MP的,因此可以采用A類輸出級。反饋電阻Rf1和 Rf2決定了LDO輸出電壓的大小。
第二個(gè)放大器具有高帶寬和AB類輸出級,可對功率晶體管的寄生電容快速充電。放大器A2的輸出連接到放大器A1的輸出和功率晶體管MP的柵極。
LDO輸出連接到A2的同相輸入端和低通濾波器RC,而低通濾波器的輸出則連接到放大器A2的輸入。這種連接方式在穩(wěn)態(tài)情況下將在A2的輸入間產(chǎn)生零電壓,從而使LDO的參數(shù)不受放大器A2的影響。在LDO的輸出負(fù)載快速變化時(shí),如果低通濾波器的時(shí)間常數(shù)大于負(fù)載瞬變變化的時(shí)間,那么A2的反相輸入端將不會(huì)發(fā)生電壓變化。A2的同相輸入跟隨LDO的輸出電壓,并開始對變化作出補(bǔ)償。由于放大器A1的帶寬很窄,因此它會(huì)明顯滯后一段時(shí)間才作出反應(yīng)。經(jīng)過稍長于低通濾波器時(shí)間常數(shù)的一段時(shí)間后,A2再次進(jìn)入穩(wěn)態(tài),且不會(huì)對LDO的參數(shù)造成影響。圖6所示為運(yùn)算跨導(dǎo)放大器A2的結(jié)構(gòu)。圖中只有一個(gè)增益級和AB類輸出級。帶寬由偏置電流Ib確定。
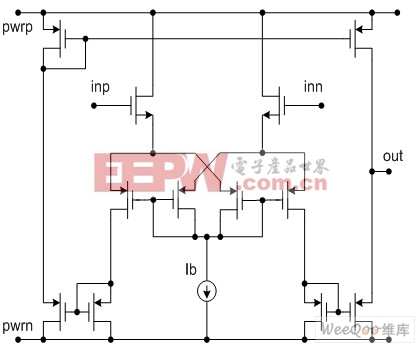
圖6:具有一個(gè)增益級的AB類放大器。
圖7所示為推薦LDO結(jié)構(gòu)的AC分析。圖7(a)為推薦LDO結(jié)構(gòu)的簡化原理圖,圖7(b)是從圖7(a)轉(zhuǎn)化而來的簡化傳遞函數(shù)的等效框圖。這樣就可以建立推薦LDO運(yùn)行的幅度響應(yīng),如圖7(c)所示。在低頻情況下,LDO的運(yùn)行主要由主放大器A1決定。但在較高的頻率下,由于出現(xiàn)了負(fù)載瞬變,因此LDO的運(yùn)行便改由快速放大器A2來決定。由于RC濾波器能夠隔離并聯(lián)放大器A1和A2的運(yùn)行,因此他們不會(huì)在同一時(shí)間工作。
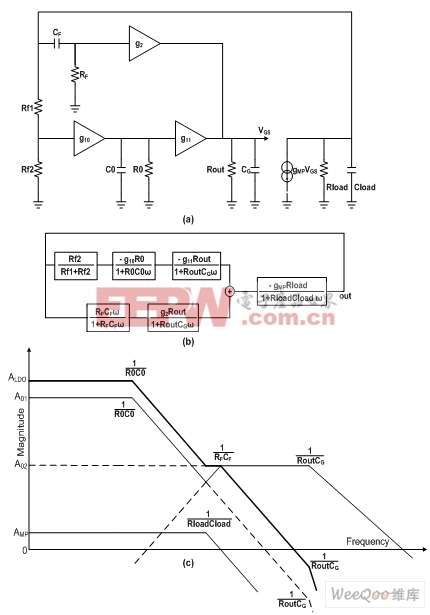
圖7:推薦LDO穩(wěn)壓器的AC分析 (a) 簡化原理圖 (b) 等效框圖 (c) 幅度響應(yīng)。










評論