S3C4480在高精度直流開關電源設計中的應用

2 PWM控制原理
采樣控制理論中有一個重要結論:沖量相等而形狀不同的窄脈沖加在慣性環節上時,其效果基本相同。PWM控制技術就是以該結論為理論基礎,對半導體開關器件的導通和關斷進行控制,使輸出端得到一系列幅值相等而寬度不相等的脈沖,用這些脈沖列來代替正弦波或其他所需要的波形,并按照一定的規則對各個脈沖的寬度進行調制。
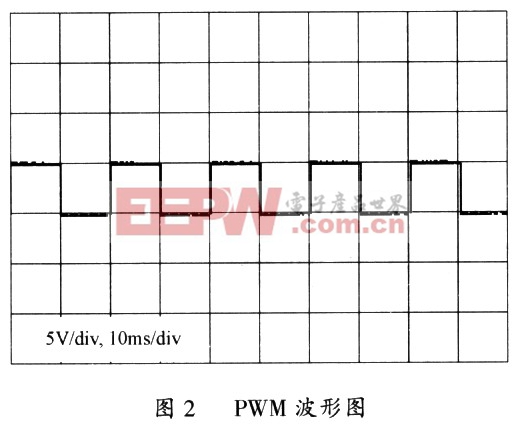
在本系統中,PWM波形由中央處理器S3C4480的時鐘TIMER0輸出口T0UTO輸出。由于要求輸出頻率30 kHz的PWM波,且精度在千分之一,所以通過設置TCFGO和TCFGl寄存器的設置,將4BIT分頻器設置為O.5,預定標寄存器設置為l,計數比較寄存器TCNTB0設置為1000,這樣,在S3C4480主頻于66MHz時,TOUT0輸出的PWM波頻率為30 kHz。當TIMER0開始計時后,每次TCNTB0的值與定時器的向下計數器值相同時,定時器控制PWM波電平改變。使得修改TC-NTB0的值可以控制PWM波的占空比,增加或者減少1,則PWM輸出占空比增加或者減少千分之一,從而達到千分之一精度。圖2為輸出的PWM波形圖,我們可以看出,通過專用的定時器輸出口TOUTO輸出的PWM波形,波形很好,經過測試,上升沿與下降沿均在ns級。
3 PID算法與軟件流程圖
3.1 主程序軟件流程
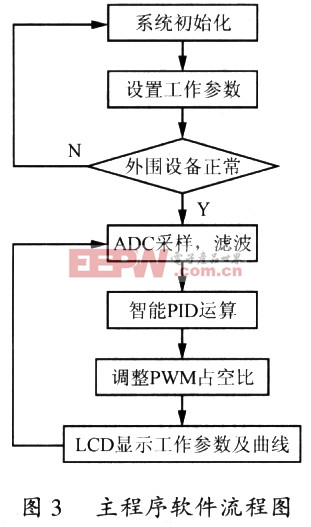
由于采用了嵌入式ARM芯片,使得在系統軟件實現中主要以C語言進行驅動和應用程序的開發,僅在CPU初始化階段使用ARM匯編語言。使用ARM S3C44BO芯片外擴了2M FLASH,8M SDRAM大容量存儲器,完全滿足了系統程序運行和數據的存儲,這樣充分發揮了S3C4—480 ARM嵌入式系統存儲器容量大,軟件編程簡單,速度快,精度高的優勢。數字控制系統軟件流程如圖2所示。
在系統開機后,首先要檢測系統外圍設備的狀態是否正常,以免出現故障。在系統運行中,為了防止軟件跑飛,還需要開啟看門狗功能,加入喂狗程序,這樣軟件上保證系統的可靠性和穩定性。在ADC部分對采樣值進行均值濾波,保證采樣值的正確與穩定。
3.2 PID控制算法
在自動控制技術中,應用最為廣泛的調節器控制規律為比例(P)、積分(I)、微分(D)控制,簡稱PID控制,又稱Pm調節。其原理的關鍵是測量、比較和執行。PID控制器將測量受控對象(在本系統中即電壓電流值)與設定值相比較,用這個誤差來調節系統的響應。
在電源數字PID控制系統中,使用比例環節控制電壓電流的輸出與輸入誤差信號成比例改變,但是實際值與給定值通常會存在偏差,這個偏差稱作穩態誤差。因此,需要引入積分環節的消除穩態誤差功能提高精度,但是考慮到電源系統開機、關機或大幅增加電壓電流工作設定值時,產生積分積累,就會引起電壓電流超調,甚至在給定值上下振蕩。所以為減小在運行過程中積分環節對電壓電流動態性能的影響,采用了積分分離PID控制電壓電流,即當電壓電流與設定工作值的誤差小于一個范圍時,再采用積分環節去消除系統比例環節產生的穩態誤差。
積分分離PID控制算法需設定積分分離閥ε,當l e(k)│>ε時,即偏差值較大時,僅采用PD控制環節,減少超調量,使系統有較快響應;當l e(k)l≤ε時,即偏差值比較小時,采用PID控制,以保證電壓電流精度和穩定度。在開機后,按照固定步長打開PWM波寬度,使得電壓升高。在達到設定值一定范圍后,為防止電壓過沖,需要加入積分分離PID控制算法進行控制,防止電壓超調。在電壓達到千分之一進度范圍后,需要加入積分環節,完成電源開機時迅速穩定的輸出。PID算法流程如圖3所示。

pid控制器相關文章:pid控制器原理








評論