基于CAN 總線的電動汽車電源管理通信系統設計

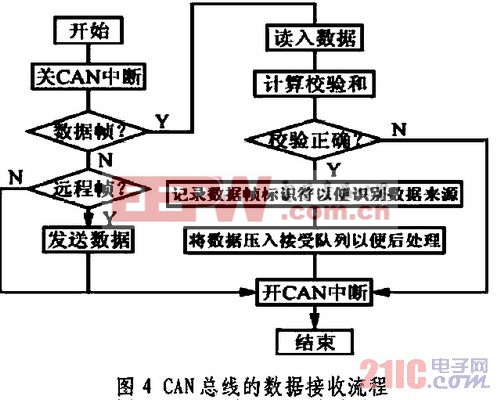
CAN 總線的三層結構模型為:物理層、數據鏈路層和應用層。其中物理層和數據鏈路層的功能由SJA1000 完成。SJA1000 在上電硬件復位之后,必須對其進行軟件初始化之后才可以進行數據通訊,其主要作用是實現對總線的速率、驗收屏蔽碼、輸出引腳驅動方式、總線模式及時鐘分頻進行定義。整個能源管控系統通信過程中,各控制器按規定格式和周期發送數據(車速、蓄電池電壓、電流和行駛阻力和發動機轉速等)到總線上,同時也要接收其它控制器的信息。總線上其它控制器根據需要各取所需的報文。對于接收數據,系統采用中斷的方式實現,一旦中斷發生,即將接收的數據自動裝載到相應的報文寄存器中。此時還可采用屏蔽濾波方式,利用屏蔽濾波寄存器對接收報文的標識符和預先在接收緩沖器初始化時設定的標識符進行有選擇地逐位比較,只有標識符匹配的報文才能進入接收緩沖器,那些不符合要求的報文將被屏蔽于接收緩沖器外, 從而減輕CPU 處理報文的負擔。上位機利用中斷方式接收相關數據的流程如圖4 所示。
5,結束語
CAN 總線作為一種可靠的汽車計算機網絡總線已開始在汽車上得到應用,使得各汽車計算機控制單元能夠通過CAN 總線共享所有的信息和資源,達到簡化布線、減少傳感器數量、避免控制功能重復、提高系統可靠性和可維護性、降低成本、更好地匹配和協調各個控制系統的目的。本文所設計的基于CAN 總線的電動汽車能源管控系統通信方案,基本能夠實現節約能源,優化發動機工作效率的目的,并且技術相對比較成熟,具有高度靈活性、簡單的擴展性、優良的抗干擾性和處理錯誤能力,對于提高汽車的動力性、操作穩定性、安全性都有重要意義。
本文引用地址:http://www.104case.com/article/179990.htm










評論