基于CAN 總線的電動汽車電源管理通信系統設計

4,基于CAN 總線的各監控節點結構和通信流程
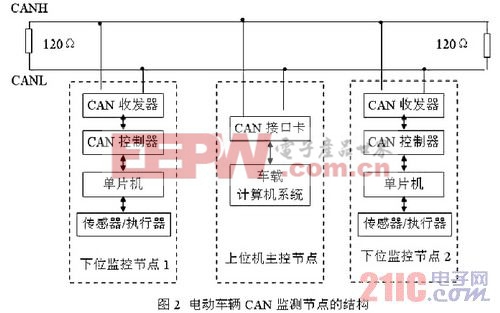
CAN 總線節點結構一般分為兩類:一類采用CAN適配卡與PC機相連,實現上位機與CAN總線的通訊;另一類則是由單片機、CAN控制器及CAN驅動器構成,作為一類節點與CAN總線進行數據傳輸,在本文設計的能源管控系統中,上位主控節點采用了第一類CAN總線節點結構,各個關鍵監測/控制系統采用了第二類 CAN 總線節點結構。各個節點的結構和系統的連接方式如圖2 所示。在總線的兩端配置了兩個120Ω的電阻,其作用是總線匹配阻抗,可以增加總線傳輸的穩定性和抗干擾能力,減少數據傳輸中的出錯率。
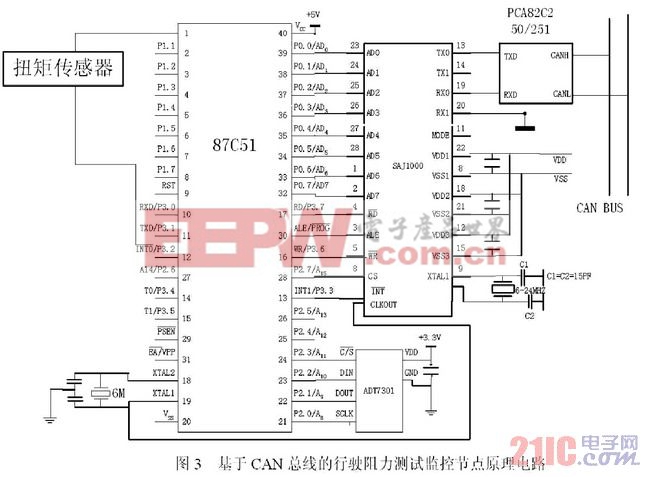
對于各個下位監控節點而言,通常可采用51 系列單片機作為該節點的監測信號初級處理中心裝置,而用SJA1000 來做C A N 控制器,PCA82C250 則是一種常用的CAN 收發器和物理總線的接口,主要可以提供對總線的差動發送能力和對CAN 控制器的差動接受能力。采用上述三種元器件構成的一個下位監控節點的電路圖形如圖3 所示。










評論