尋北儀中力矩電流發生器的設計

摘要:針對撓性陀螺尋北儀控制力矩產生的需要,設計了力矩電流發生器。控制計算機解算得到的控制電流所對應的控制電壓通過ADT800輸出給壓控恒流源,通過軟件控制開關電路實現控制電流的精粗和極性轉換,解決了系統對大范圍、高精度控制電流的需求。實驗測試表明,該電路工作穩定,能滿足系統性能要求,可推廣應用到其他慣性導航系統中。
關鍵詞:尋北儀;撓性陀螺儀;力矩器;恒流源;開關電路
O 引言
尋北儀在軍事和民用領域都有著廣泛應用,它可測出載體縱軸與真北的夾角,用于為車輛、船舶等載體提供方位基準。力矩電流發生器作為尋北儀的重要組成部分,地位極其重要,其作用是將計算機輸出的以數字量形式表示的方位和水平電流值轉換成模擬電流,分別輸入陀螺儀方位力矩器和水平力矩器,以產生找北力矩和阻尼力矩,使陀螺儀主軸跟蹤地理子午面的運動。
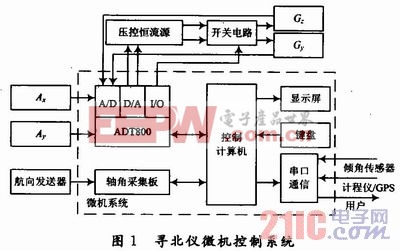
1 尋北儀微機控制系統
圖1給出了尋北儀微機控制系統的示意圖。控制計算機完成對主體儀器的檢測和控制,同時負責顯示、鍵盤等人機交互內容。控制計算機通過串口獲取傾角傳感器姿態、航向發送器航向、計程儀/GPS航速等信息,利用ADT800模塊的A/D部分采集2路加速度計Az、Ay以及水平信號器Ey、方位信號器Ez等信息,定時解算控制電流并通過串口向其他設備發送航向信息。計算機解算得到的控制電流為數字形式,通過ADT800模塊的D/A部分輸出代表電流大小的電壓信號,通過壓控恒流源轉換為電流輸出,輸入到主體儀器的陀螺力矩器中,使陀螺跟蹤地理坐標系。
2 力矩電流發生器硬件電路
2.1 總體結構
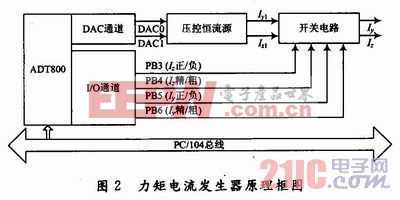
根據尋北儀總體要求,控制電流有兩路,其中一路控制方位、一路控制水平,輸出控制電流的最大值為80 mA,最小值為0.5 μA,電流精度要求優于O.5μA。如果不分檔,要滿足這樣大的范圍和高精度的要求,D/A轉換的分辨率應為1 LSB=O.5×10-3/80=1/160 000(小于1/217而大于1/218),故需要18位的D/A轉換芯片,并要求有關電路具有百萬分之六的精度。為了降低對元器件的要求,將輸出電流分為2檔:取精電流的范圍為O~1.25 mA;而粗電流的范圍取為1.25~80 mA。分檔后對精電流精度的誤差要求為δ=O.5×10-3/1.25=O.000 4。若選取12位的D/A轉換芯片,其分辨率為1LSB=1/212=0.000 244,可見能滿足精度要求。為了進一步提高轉換精度,采用電壓控制的恒流源向負載(陀螺力矩器線圈)提供電流。由于電流是恒流源,故它不會受負載變化以及電源波動等因素影響,保證了轉換精度。D/A輸出的電壓信號由計算機根據修正回路控制模型補償各種尋北儀誤差后解算控制輸出。設計的力矩電流發生器原理框圖如圖2所示。










評論