一種多功能輸出開關電源

圖3是具體控制原理。為消除輸出諧波,電路采用了電壓、電流雙環控制,其中,Vf為反饋電壓,If為反饋電流。電壓調節環的輸出作為電流環的比較基準,電流環輸出誤差信號與三角波信號比較得到SPWM信號。由IR2110芯片構成驅動電路,由此輸出相位互補的兩路SPWM信號分別驅動四個開關管。為防止上下橋臂直通,兩路SPWM信號之間必須設置死區。保護電路起到監控Vf、If的作用,如果幅值超出閾值,保護電路將關閉驅動信號。
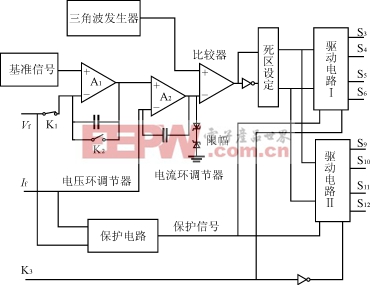
圖3 逆 變 級 控 制 電 路
4 多功能輸出的實現
在此電源系統中,電壓源和電流源的控制采用同一控制電路,通過繼電器切換到不同的工作模式。電壓源工作時,繼電器K1合,K2開(如圖3所示),采用電壓、電流雙環調節控制,基準信號為正弦信號,輸出交流電壓;基準為直流電平,輸出直流電壓。電流源工作時,K1開,K2合,電壓調節環變為跟隨器,只通過電流環調節,基準為正弦信號,輸出交流電流;基準為直流電平,輸出直流電流。電壓源和電流源驅動信號切換是通過K3來實現的,在電壓源工作方式,關斷電流源的前級;在電流源工作方式,關斷電壓源的前級,這樣可以防止干擾,提高電路的可靠程度。以上的K1、K2、K3是由數控電路給出的。
5 占空比限制與輸出交流電壓的削頂
5.1 PI調節器輸出限幅的考慮
由于所采用的專用驅動芯片IR2110是通過自舉供電方式來驅動橋臂上管的(如圖4所示)。所以,在上、下管驅動信號恒低或恒高時,給上管供電的自舉電容C1能量得不到補給。當電容上的能量放完后,上管關斷,就會出現此橋臂無驅動信號,無輸出的現象。尤其是直流電壓時,常有這一現象。
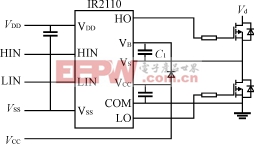
圖4 逆 變 級 驅 動 電 路
在逆變器控制中,PI調節器輸出的幅度如果超過三角波的幅度,就會出現過調制的現象,此時,PWM驅動脈寬會過窄或過寬,還會使上述自舉電路工作不正常。因此,必須對占空比的最大值與最小值加以限制。
具體方法是,可以在PI調節器的輸出端作一定的限幅(見圖3),使控制電路不出現過調制的情況,限制PWM的最大、最小占空比,使IR2110的自舉電容C1能及時充電。采用限幅的另一個好處是消除了由于IR2110自舉失敗導致的電路損壞,提高了可靠性。
5.2 輸出電壓不正常削頂的消除
逆變器控制電路的限幅會使輸出波形削頂。但在交流輸出未達到限幅值之前,可能首先出現明顯的單邊削頂(例如在正半波的峰值處)。主要原因是三角波不對稱,存在直流偏置,在與PI調節輸出比較時,出現一邊被限幅,造成輸出單邊削頂現象。提高母線電壓,使實際需求的占空比變化范圍縮小,可以消除輸出削頂現象。
但是,隨最大占空比的下降,調制比下降更快。這會降低母線電壓的利用率,導致逆變級的容量擴大。本文的電路用低偏壓、低噪聲精密運算放大器來產生三角波,同時采用糾偏方法消除直流偏置、確保三角波的對稱性,提高了母線電壓的利用率。
為確保電路正常工作,同時輸出波形不削頂,在此電路中設定最大占空比為0.85,相應的最大調制比為0.7。






評論