電源模塊并聯供電的冗余結構及均流技術

如果采用1+1冗余結構,即采用兩個輸出電流為100A的電源模塊并聯供電。正常情況下只有一個模塊工作,當它發生故障,退出工作時,另一個模塊開始工作,系統仍然能正常運行。
如果采用2+1冗余結構,即采用3個輸出電流為50A的電源模塊并聯供電。正常情況下只有兩個模塊工作,當其中之一發生故障,退出工作時,另一個模塊開始工作,系統仍然能正常運行。
如果采用3+1冗余結構,即采用4個輸出電流為33A的電源模塊并聯供電,正常情況下只有3個模塊工作,當其中之一發生故障,退出工作時,另一個模塊開始工作,系統仍然能正常運行。
比較上面三種工作方式,采用2+1這種方式最好,這是因為,1+1方式中有一半的功率被閑置,而3+1方式中使用元器件太多,成本過高,經濟性不好。
3 幾種傳統的并聯均流方案
3.1 下垂法
下垂法全稱外特性下垂法,也叫做斜率控制法。在并聯電源模塊系統中,各個電源模塊是獨立工作的。每個模塊根據其外特性以及電壓參數值來確定輸出電流。在下垂法中,主要是利用電流反饋信號來調節各模塊的輸出阻抗,也就是調節Vo=f(Io)的斜率,從而調節輸出電流。其工作原理圖如圖3所示。
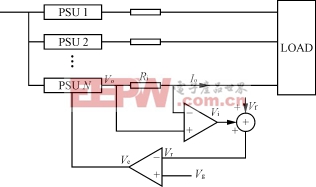
圖3 下垂法工作原理圖
Ri為任一并聯模塊輸出電流Io的采樣電阻,經電流放大產生電流反饋電壓信號Vi,Vf為輸出電壓反饋,Vr為Vi與Vf的和,Vg為控制基準電壓(5V),Ve為誤差電壓。當某一模塊輸出電流Io偏大時,電壓與電流反饋合成信號Vr=Vi+Vf增大,與Vg進行比較后,使Ve減小,Ve反饋回電源模塊的控制部分,使該模塊的輸出電壓Io下降,則Io減小,即Vo=f(Io)外特性下調。每個模塊各自調整自己的輸出電流,就可以實現各模塊的并聯均流。
這種方法的優點是簡單,不需要外加專門的均流裝置,屬于開環控制。缺點是調整精度不高,每個模塊必須進行個別調整,如果并聯的模塊功率不同的話,容易出現模塊間電流不平衡的現象。
3.2 主從電源法
主從電源法是將并聯的多個電源模塊中的一個作為主模塊,其他模塊跟隨主模塊工作。具體工作過程是:主模塊的工作電流與輸出反饋信號進行比較,將差值信號反饋回各電源模塊(包括主模塊和從模塊)的控制電路,從而調節各模塊的輸出電流大小。
如圖4所示,設模塊1為主模塊,其輸出電流的采樣電壓為V1,其他模塊輸出電流的采樣電壓為Vn。當某一模塊輸出電流偏大時,相應的Vn增大,與V1比較,得到的Ven減小,反饋給該模塊的控制電路中,減小其輸出電流,從而實現均流。
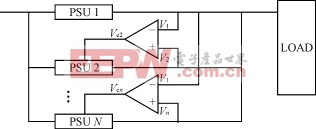
圖4 主從電源法工作原理圖
主從模塊法的優點是不須外加專門的控制電路。其缺點是,各個模塊間需要有通信聯系,連線比較復雜;其最大缺點是,一旦主模塊出現故障,則整個電源系統將崩潰,所以,不能用于冗余結構中。
3.3 自動均流法和最大電流法
自動均流法也叫單線法,其工作原理是,將各電源模塊都通過一個電流傳感器及一個采樣電阻接到一條均流母線上。
如圖5所示,當輸出達到均流時,輸出電流I1為零。反之,則電阻R上由于有電流I1流過,在其兩端產生一個電壓Uab,這個電壓經過放大器A輸出電壓Uc,它與基準電壓Ur比較后的ΔU,反饋回電源模塊的控制部分,從而調節輸出電流,最終實現均流。
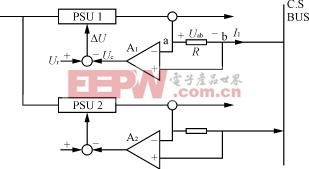
圖5 單線法工作原理圖



評論