兩種優化開關模式在高頻SVPWM逆變電源中的應用

2.2 軟件設計
在軟件編寫中,根據高頻逆變電源的控制要求,全部采用編譯效率最高的匯編語言,這樣可更有效地利用TMS320LF2407A的高速數據處理能力。同時,軟件中盡量使用240x系列DSP的復合指令,如MPYA,SPAC,LTS,DMOV等,以最大程度地精簡程序,減小DSP運算量。以下將結合改進的SVPWM算法,分別對兩種開關優化模式進行編程。
2.2.1 優化模式1的純軟件波形生成法
該法從開關時間參數的計算到輸出向量的選取,全部采用軟件實現。軟件由三部分組成,即主程序,定時器周期中斷子程序和保護中斷子程序。主程序負責各種初始化工作;保護子程序完成故障監控和故障處理功能。程序主體為定時器周期中斷子程序,負責完成SVPWM的改進算法及模式1的PWM波輸出。程序流程圖如圖6所示。
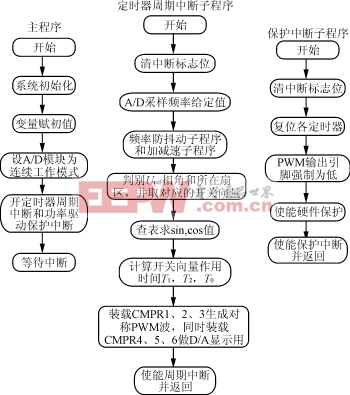
圖6 程序流程圖
2.2.2 優化模式2的混合波形生成法
為實現優化模式2的開關動作,可利用TMS320LF2407A內部極大簡化的電壓空間矢量PWM波形產生硬件電路,即軟件結合集成硬件的混合波形生成法。在軟件中只要對相應的控制寄存器進行設置即可。必須添加的步驟如下:設置COMCONA寄存器使DSP工作于空間矢量PWM模式;查表并將每個控制周期中初始向量(UX)的開啟方式寫入到ACTRA.14~12位中,如U1的寫入值為(100);將“1”(“1”表示參考向量Uref為順時針旋轉,“0”表示Uref為逆時針旋轉)寫入ACTRA.15中;最后將T1/2寫入到CMPR1寄存器,將(T1+T2)/2寫入到CMPR2寄存器。這樣,空間矢量PWM波形產生硬件電路將根據初始向量和參考向量的旋轉方向,自動選擇模式2所示的優化開關組合。
3 實驗結果分析
為驗證本文提出的SVPWM改進算法和兩種優化開關模式的實際效果,首先進行了MATLAB仿真驗證。控制系統仿真模型如圖7所示。由于數字化SVPWM逆變器模型實為一個離散控制系統,所以采用MATLAB中的S函數編程,來模擬SVPWM離散算法,只要改變S函數輸出向量的時間和順序就可分別實現兩種優化開關模式的控制仿真,圖7中cqc模塊為S函數模塊。
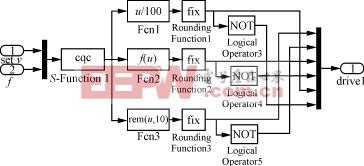
圖7 控制系統仿真模型
圖8及圖9分別為感性負載下兩種優化模式在1000Hz輸出時的仿真波形。其中uan及ubn為經過一階RC濾波后的相電壓波形,uab為RC濾波后的線電壓波形,is-a為對應電流波形。由仿真波形可見,采用開關優化模式1時,相電壓為典型的馬鞍波形,其對應的線電壓、線電流諧波含量很小,不過在一個采樣周期中開關次數較多。而采用優化模式2時,相電壓中出現了微小畸變,使得輸出線電流諧波含量增加,但是它的開關損耗僅為前面的67%,這將有利于高頻逆變器向更高的控制頻率發展。可見二者各有優缺點。
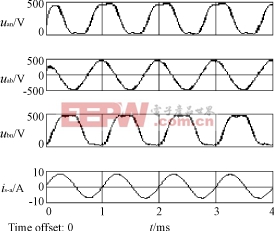
圖8 優化模式1仿真波形(1000Hz)
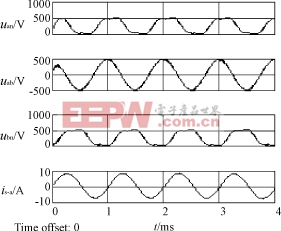
圖9 優化模式2仿真波形(1000Hz)
圖10及圖11為在TMS320LF2407A最小控制系統下的實驗波形,可見與仿真波形相似。實驗樣機設計輸出功率為2000V·A,輸入是220V,50Hz單相交流電,輸出為可在0到1000Hz連續變化的三相交流電。由于IR2130自帶2μs的死區,使得模式2的PWM波形不再具有對稱性,這導致了實驗中輸出相電壓馬鞍波形畸變得更大些。但從線電壓,線電流上看,兩種方法所輸出的波形均具有很高的正弦性。
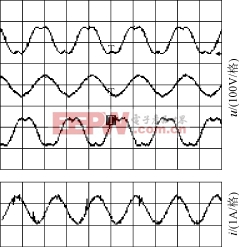
t/(500μs/格)
圖10 純軟件SVPWM波形生成法實驗波形(1000Hz)
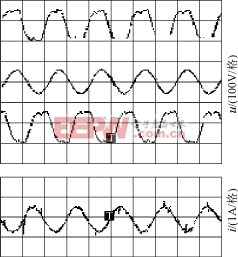
t/(500μs/格)
圖11 混合SVPWM波形生成法實驗波形(1000Hz)
另外,經過計算可知,改進SVPWM算法后,采用兩種開關優化模式的周期中斷子程序,TMS320LF2407A均可在7.2μs內執行完畢,而控制周期為23.8μs,這就為DSP完成其他更復雜的電機控制程序預留了足夠的程序處理時間。
4 結語
實驗證明改進SVPWM算法后,本文所設計的基于TMS320LF2407A的高頻SVPWM逆變電源樣機,在采用兩種優化開關模式后,不但具有直流電壓利用率高,軟件開發周期短等優點,而且還可達到提高輸出波形質量和減少開關損耗的效果,具有一定的實用價值。



評論