電流型變換器工作原理和斜坡補償

比D、輸入電壓無關
在100%占空比下求解這個方程有:
m>(-1/2)/m2(3)
為了保證電流環路穩定工作,應使斜坡補償信號的斜率大于電流波形下降斜率m2的1/2。對圖1所示的Buck型變換器,m2等于(VO/L)RS。所以補償波形的幅度A應按下式計算:
A>TRS(VO/L)(4)
從而保證變換器的占空比大于50%時變換器能穩定工作。
2.2次諧波振蕩
對電流型控制而言,內環電流環峰值增益是個很重要的問題,這個峰值增益在開環頻率一半的地方,由于調制器的相移可能在電壓反饋環開關頻率一半的地方產生振蕩,這種不穩定性叫做次諧波振蕩。
3峰值電流檢測與平均電流檢測
在電流型變換器中由平均電感電流產生一個誤差電壓,這個平均電感電流可用一個電流源來代替,并可以降低系統的一個階次。然而如圖3所示,峰值電流檢測方法常使電感的平均電流隨占空比而變,致使輸入一輸出(正向特性)不理想。如選用圖4所示m=-(1/2)m2的斜坡補償率,可以把峰值電流檢測轉變為平均電流檢測,而得到很好的電流型控制效果。但需注意m=-(1/2)m2,占空比接近1時的次諧波振蕩現象。
4小紋波電流
從性能的角度總希望紋波電流要小,首先它可以使輸出濾波電容的容量減小,并在輕載時的電流連續工作模式下輸出紋波小。雖然對電流檢測電路的小斜坡補償量,在許多情況下可以得到小的紋波電流,但將由于隨機和同步噪聲信號的引入而致使脈沖寬度擺動。并且斜坡補償加到電流波形上將會產生一個更穩定的開關點,為達到這個目的,相對于電感電流這個補償量m應大于m2,并且這對次諧波穩定是有必要的。但任何斜坡補償大于m=-(1/2)m2將使變換器的特性偏離理想電流型變換器而更像一個電壓型變換器。
5UC1846的斜坡補償
UC1846是一種采用斜坡補償的電流型集成控制芯片,它具有恒頻PWM電流型控制所需的控制電路和相關電路。圖5(a)和圖5(b)表示采用UC1846實施斜坡補償的兩種電路原理圖。在第4腳的電流檢測信號和斜坡補償信號直接相加很容易實現,但這又在電流檢測電路中引入了誤差。另一種方法就是把這個斜坡補償加至誤差放大器的反相輸入端,采用這種方法的前提條件是:
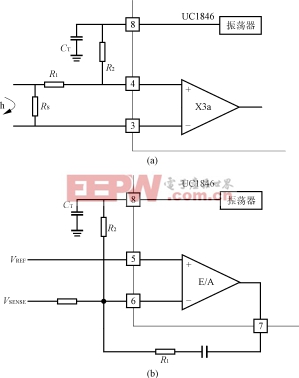
圖5UC1846采用不同斜坡補償方法的電路原理圖
(a)斜坡補償信號和電流檢測信號相加
(b)斜坡補償信號直接和誤差信號相加
——開關頻率固定(這種情況下R1/R2固定),并且誤差放大器增益固定;
——計算所需斜坡補償量時要把電壓誤差放大器,電流誤差放大器的增益都考慮進去。在任何一種情況下,一旦R2的值確定后,負載對CT的影響也可以確定。
6結論
本文主要討論了電流型變換器的斜坡補償原理及實現方法、電路。由于雙環電流型變換器性能好,輸出性能可以和線性穩壓器相比,并可用于系統并聯均流,所以得到了廣泛應用。本文對如何正確實現斜坡補償有一定實際意義。



評論