連續調制模式功率因數校正器的設計

介紹了有源功率因數校正的工作原理及實現方法,并針對各種校正技術的特點進行了對比分析。之后著重分析了工作于連續調制模式下的升壓型有源功率因數校正技術,并提供了完整的設計方案。實驗表明應用該方案設計的功率因數校正電路可以穩定地將功率因數提高到0.99以上,并將總諧波失真降至10%以下。最后給出了實驗的數據及部分波形。
本文引用地址:http://www.104case.com/article/179168.htm0 引言
傳統的從220V交流電網通過不控整流獲取直流電壓的方法在電力電子技術中取得了極為廣泛的應用,其優點在于結構簡單、成本低、可靠性高。但這種不控整流使得輸入電流波形發生嚴重畸變,呈位于電壓峰值附近的脈沖狀,其中含有大量的諧波成分。一方面對電網造成嚴重的污染,干擾其他電子設備的正常工作;另一方面也大大降低了整個電路的功率因數,通常僅能達到0.5~0.7。
解決這一問題的辦法就是對電流脈沖的高度進行抑制,使電流波形盡量接近正弦波,這一技術即為功率因數校正(Power Factor Correction)。功率因數(PF)是指有功功率(P)與視在功率(S)的比值,即:
PF=![]() ×cosΦ=γcosΦ
×cosΦ=γcosΦ
所以,功率因數可以定義為電流失真系數(γ)和相移因數(cosΦ)的乘積。
功率因數校正技術,從其實現方法上來講,就是使電網輸入電流波形完全跟蹤電網輸入電壓波形,使得輸入電流波形為正弦波(γ=1),且和電壓波形同相位(cosΦ=1)。在理想情況下,可將整流器的負載等效為一個純電阻,此時的PF值為1。
功率因數校正技術大致可以分為無源和有源兩種,考慮到無源PFC的體積龐大且性能較差,因此本文只針對有源功率因數校正(APFC)技術做一些方法性的探討。
1 APFC技術的實現方法及其特點
1.1 APFC電路的基本結構
1.1.1 降壓式
如UC3871,因其噪聲大,濾波困難,功率開關管上的電壓應力大,控制驅動電平易浮動,故很少被采用。
1.1.2升/降壓式
如TDA4815、TDA4818,須用兩個功率開關管,其中一個功率開關管上的驅動控制信號浮動,電路復雜,故較少被采用。
1.1.3 反激式
如ML4813,輸出與輸入隔離,輸出電壓可以任意選擇,采用簡單電壓型控制,適用于150W以下小功率的應用場合。
1.1.4 升壓式
此方法被廣泛采用,其特點為簡單電流型控制,PF值高,THD小,效率高,但是輸出電壓高于輸入電壓。適用于75~2000W功率范圍的應用場合,應用最為廣泛。它具有以下優點:電路中的電感L適用于電流型控制;由于升壓型APFC的預調整作用在輸出電容C上保持高電壓,所以電容C的體積小、儲能大;在整個交流輸入電壓變化范圍內能保持很高的功率因數;輸入電流連續,并且在APFC開關瞬間輸入電流小,易于EMI濾波;升壓電感L能阻止電壓、電流的瞬變,提高了電路的可靠性。
1.2 APFC電路中輸入電流的控制原理
1.2.1 平均電流型
如ML4832、UC3854,工作頻率恒定,采用連續調制模式(CCM),工作波形如圖1所示。這種控制方式的優點是恒頻控制;工作在電感電流連續狀態,開關管電流有效值小、EMI濾波器體積小;能抑制開關噪聲;輸入電流波形失真小。主要缺點是控制電路復雜;須用乘法器和除法器;須檢測電感電流;需電流控制環路。

圖1 平均電流型
1.2.2 峰值電流型
如ML4831、MC34262,工作頻率恒定,CCM,工作波形如圖2所示。

圖2 峰值電流型
1.2.3 滯后電流型
如CS3810,工作頻率可變,CCM,電流達到滯后帶內發生功率開關的導通或關斷,使輸入電流上升或下降。其電流波形平均值取決于電感輸入電流,工作波形如圖3所示。
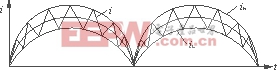
圖3 滯后電流型
1.2.4 電壓跟蹤控制型
如ML4813、SG3561,工作頻率可變,采用不連續調制模式(DCM),其工作波形如圖4所示。DCM采用跟隨器的方法,具有電路簡單、易于實現的優點,但也存在以下缺點:功率因數和輸入電壓Vin與輸出電壓VO的比值Vin/VO有關,即當Vin變化時,功率因數PF也將發生變化,同時Vin/VO的增大使得輸入電流波形的THD增大;開關管的峰值電流大(在相同容量情況下,DCM中通過開關管的峰值電流為CCM的2倍),從而導致開關管的損耗增加。所以,在大功率的應用場合中,基于CCM方式的APFC更具優勢。
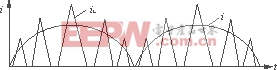
圖4 電壓跟蹤控制型
2 CCMAPFC電路的設計方法
基于以上各種方案的特點分析可知,在75~2000W功率的應用場合中,選擇工作于連續調制模式下的平均電流型BoostAPFC電路來實現較為適合。在具體的電路設計中,控制芯片選用UC3854A(其內部結構見圖5),這是Unitrode公司生產的一款高功率因數校正集成控制電路芯片,它的峰值開關電流近似等于輸入電流,對瞬態噪聲的響應極小,是一款理想的APFC控制芯片。
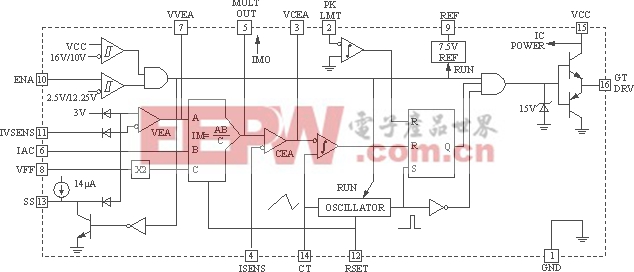
圖5 UC3854A內部結構圖
2.1 技術指標
輸入電壓 Vin=AC 150~265V;
輸出電壓 VO=DC 400V;
電源頻率 f=47~65Hz;
輸出功率 PO=2kW;
開關頻率 fs=50kHz。
2.2 開關頻率
開關頻率高可以減小PFC電路的結構尺寸,提高功率密度,減小失真;但頻率太高會增大開關損耗,影響效率。在大多數應用中,20~300kHz的開關頻率是一個較好的折中。本設計中開關頻率選擇為50kHz,這樣電感量的大小合理,尖峰失真小,電感的物理尺寸較小,MOSFET和Boost Diode上的功率耗損也不會過多。在更高功率的PFC設計中,適當降低開關頻率可以降低開關損耗。振蕩器的工作頻率由式(1)決定。
fs=![]() (1)
(1)
2.3 Boost電感的選擇
電感決定了輸入電流紋波的大小,它的電感量由規定的紋波電流給出。
最大峰值電流出現在最小線路電壓的峰值處,并由式(2)給定。
ILINE(PK)=![]() ×P/Vinmin(2)
×P/Vinmin(2)
電感器中的峰—峰值紋波電流,通常選擇在最大峰值線路電流的20%左右,即
ΔI=ILINE(PK)×20%(3)









評論